数年ラズパイ2モデルBをNTP時計として便利に使えていたのに、起動しなくなってしまった。原因はSDカードの不良かな。
↓ 先日まで作動していたラズパイ時計。画像はインストール当時の物です。
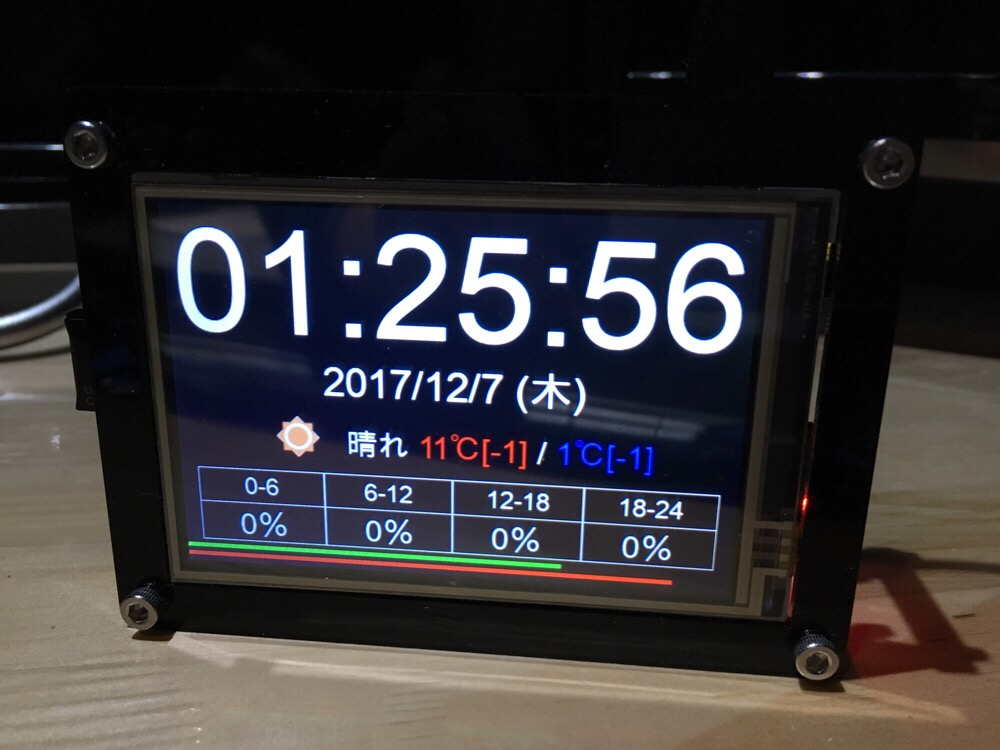
↑ MagicMirror2ではありません。
↓ 今回、新たにMagicMirror2をインストールして生まれ変わったラズパイ2モデルBの画面。と言ってもこの画像はVNC Viewerのスクリーンショット。アスペクト比は3:2で、3.5インチHDMI液晶モニターに合わせて加工しましたので、ほぼ液晶モニターの表示と同じです。
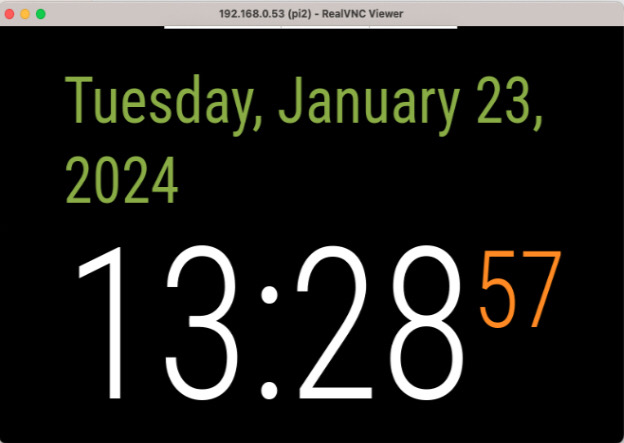
↑ 私がカスタマイズしたら、なんかあっさりしてしまいました。でも3.5インチの狭い画面では、これがベストだと思っています。
今回初めて知ったMagicMirror2は有名の様で、ネットにインストール記事が幾つもあります。そんな先人の方々の記事を参考にインストールしました。
↓ 私が参考にさせて頂いた記事はこちらです。カレンダー付や画像を貼り付けたセンスの良い時計が作れる様です。
RaspberryPiとミニディスプレイでシンプル卓上カレンダー作ってみた
RaspberryPi+MagicMirror2で超簡単にGoogleフォトフレームをつくる
MagicMirror_scripts
MagicMirror2のインストールは次の2行を打ち込むだけで良く、最後に問われてイエス(y)と2回答えれば、スリープしなくなったり、OS再起動時にMagicMirror2も自動で起動してくれます。
~ $ sudo apt install nodejs npm
~ $ bash -c "$(curl -sL https://raw.githubusercontent.com/sdetweil/MagicMirror_scripts/master/raspberry.sh)"
Do you want to disable the screen saver? (y/N)? y
server does not have extension for -dpms option
Do you want use pm2 for auto starting of your MagicMirror (y/N)? y
↓ 手動でスタートとストップをする方法。
~ $ pm2 start MagicMirror
~ $ pm2 stop MagicMirror
今回(も)、時計専用になったラズパイ2モデルBには、NTPをインストールしてNTPサーバー兼ねるNTP時計にします。正確に時刻を刻む時計なら電波時計でも良いのですが、部屋の中は電波が届かない場所が多く使い物になりませんし、市販品の時計にNTPサーバー機能付きが有ったとしても、多分高くて私には入手出来ません。
また自宅にNTPサーバーを立てる理由は、パソコンの時計合わせに使用する為です。アマチュア無線でFT8を運用するパソコンの時計は常に正確を求められるので、自宅にNTPサーバーが有れば遠慮なく頻繁に同期させる事が出来ます。
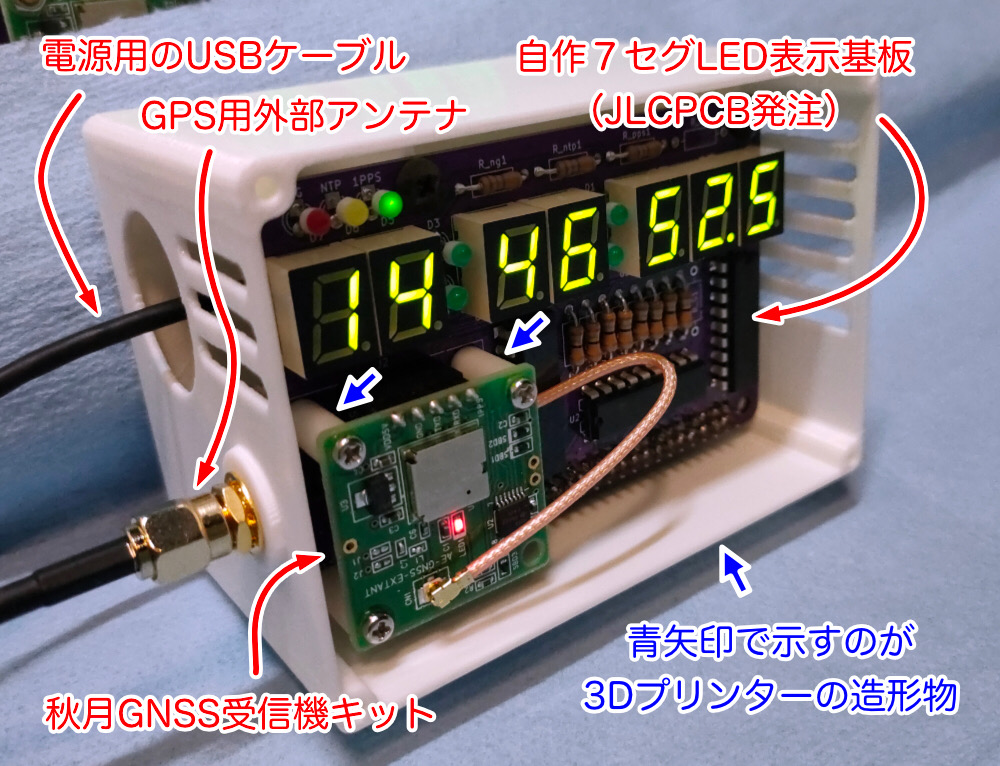
【自慢話】我が家にはGNSSモジュールの1PPSを利用したStratum 1相当のNTPサーバー(ラズパイで自作)が2台稼働しています。なので、今回のこの時計はその2台を参照してStratum 2相当のNTPサーバーとして稼働します。
↓ このNTP時計のntp.confは次のような設定にして、自作Stratum 1相当のNTPサーバーの2台(192.168.0.55と192.168.0.56)は16秒(minpoll 4 maxpoll 4)のポーリング間隔。予備のNICT公開NTP(ntp.nict.jp)に対しては、最小ポーリング間隔1024秒(minpoll 10)、最大ポーリング間隔は36.4時間(maxpoll 17)にしています。
server 192.168.0.55 prefer iburst minpoll 4 maxpoll 4
server 192.168.0.56 prefer iburst minpoll 4 maxpoll 4
server ntp.nict.jp iburst minpoll 10 maxpoll 17
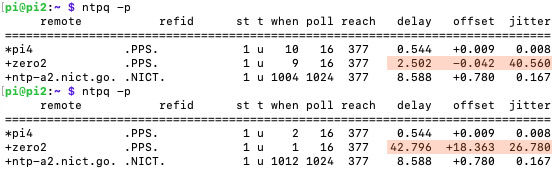
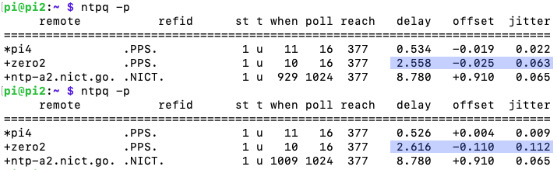
↓ 結果
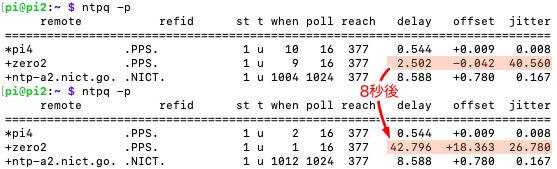
↑ 本記事のタイトルとまた離れてしまうけど。zero2の値がStratum 1相当と言えるのか疑問に思ってしまう。この画像はntpq -pを2回行ったもので、オレンジ色部分の値が、遠く離れたNICTより悪い値になっている。
成績が悪いzero2と、良い成績のpi4の違いは、無線か有線の違いくらい。zero2はWi-Fi接続なので、pi4の有線接続より不利なんだろうか?
【後日追記】その成績不良であるRaspberry Pi Zero 2 WのWi-FiのPower Managementをオフにしたらjitterの値が良くなったので、それを書き残したページのリンクを貼って置きます。↓
ラズパイのWi-Fi改善
ちなみに、ntpq -pを実行したPi2は有線接続です。また、zero2でntpq -pを実行すると以下のようにStratum 1相当と思う値です。↓