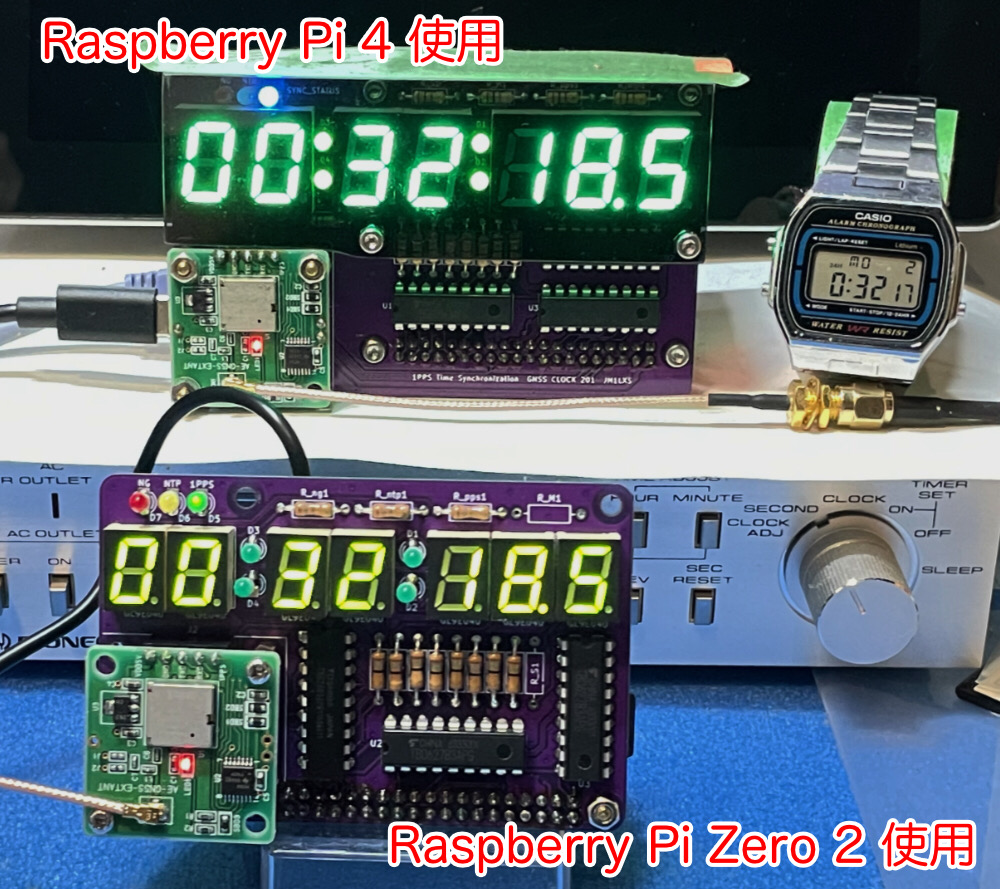
ラズパイ7桁時計(自作中)の1/10秒表示とGPSの1ppsを比べてみました。
↓ 右端の7セグLEDが1/10秒で、GPSの赤LEDのフラッシュ時間も1/10秒です。
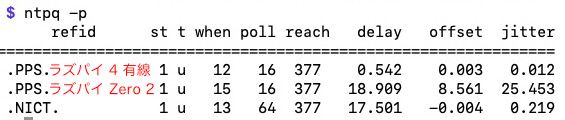
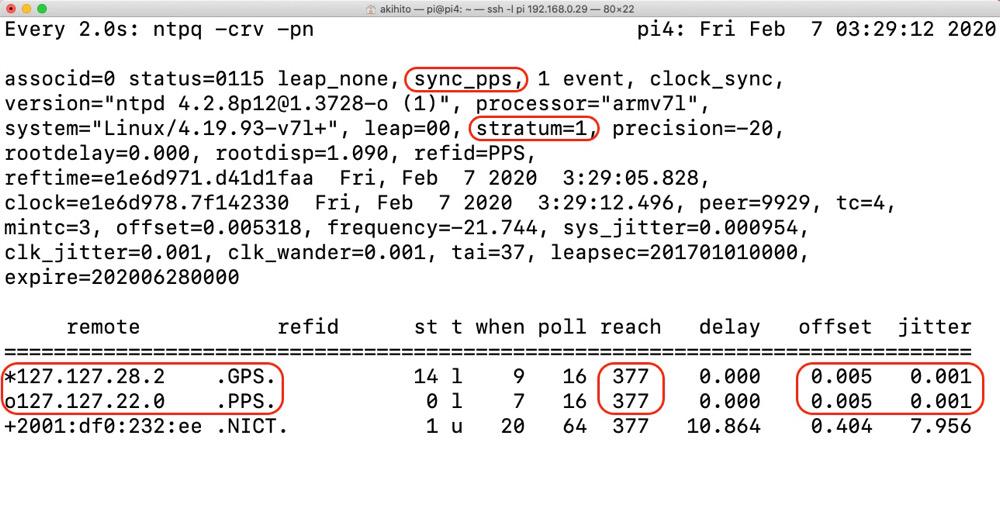
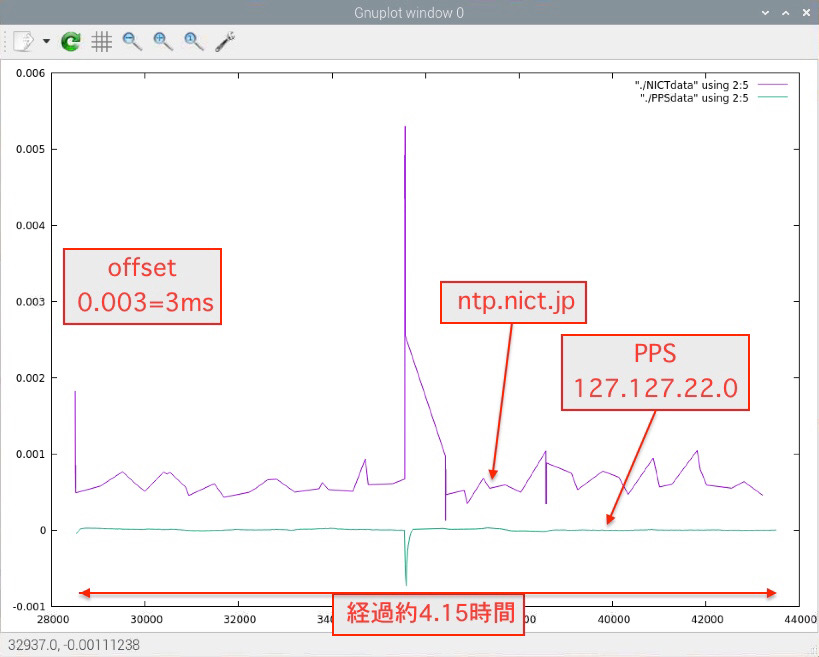
Stratum 1 のNTPサーバーと参照同期中のラズパイ7桁時計の1/10秒と、GPSの1PPSを比べる為に、高速度カメラ(iPhoneのスローモーション240fps)で撮影した動画です。
1/10秒単位の表示もバッチリ合っていますね。
このラズパイとGPSは繋げていません。別々に作動しています。
↓ ラズパイ7桁時計のソースコード
/*
* clock2.cpp
*
* 1/10秒表示テスト
*
* 7桁ダイナミック表示対応
* 時刻 08:34:27.6 の場合
* 表示順序は 6 -> 7 -> 2 -> 4 -> 3 -> 8 -> 0
*
*/
#include <iostream>
#include <pigpio.h>
#include <unistd.h>
#define H 0x1
#define L 0x0
#define COM_ON 0x1
#define COM_OFF 0x0
using namespace std;
void mainLoop(void);
int main(void)
{
if (daemon(0, 0) == 0) { // デーモン関数
mainLoop();
} else {
cout << "error" << endl;
}
return 0;
}
void mainLoop(void)
{
int i, j;
int num[7];
struct timespec ts;
struct tm lotm;
// .1秒 1秒 10秒 1分 10分 1時 10時
// Common 1 2 3 4 5 6 7
static int common[7] = {25, 24, 23, 18, 22, 27, 17};
// GPIO 25 24 23 18 22 27 17
// 7seg a b c d e f g dp
static int nanaseg[8] = {21, 20, 16, 26, 19, 6, 13, 12};
// GPIO 21 20 16 26 19 6 13 12
static int segdata[12][8] = { // 7セグメントデータ
// a b c d e f g dp
{H, H, H, H, H, H, L, L}, // 0
{L, H, H, L, L, L, L, L}, // 1
{H, H, L, H, H, L, H, L}, // 2
{H, H, H, H, L, L, H, L}, // 3
{L, H, H, L, L, H, H, L}, // 4
{H, L, H, H, L, H, H, L}, // 5
{H, L, H, H, H, H, H, L}, // 6
{H, H, H, L, L, L, L, L}, // 7
{H, H, H, H, H, H, H, L}, // 8
{H, H, H, H, L, H, H, L}, // 9
{L, L, L, L, L, L, L, L}, // Blank
{L, L, L, L, L, L, L, H}, // dp
};
// pigpioライブラリ初期化
if (gpioInitialise() < 0) exit(1);
// コモン用GPIOピンをアウトプット設定
for (i = 0; i < 7; i++) {
gpioSetMode(common[i], PI_OUTPUT);
}
// セグメント用GPIOピンをアウトプット設定
for (i = 0; i < 8; i++) {
gpioSetMode(nanaseg[i], PI_OUTPUT);
}
/*
*
* 時刻取得及びダイナミック表示ルーチン(無限ループ)
*
* 時刻取得、1桁2ミリ秒表示×7、時刻取得、1桁2ミリ秒表示×7の繰り返し
*
*/
while (1) {
clock_gettime(CLOCK_REALTIME, &ts); // 時刻の取得
localtime_r(&ts.tv_sec, &lotm); // ローカル時間に変換
num[0] = ts.tv_nsec / 100000000; // 0.1秒の桁取得
num[1] = lotm.tm_sec % 10; // 1秒の桁取得
num[2] = lotm.tm_sec / 10; // 10秒の桁取得
num[3] = lotm.tm_min % 10; // 1分の桁取得
num[4] = lotm.tm_min / 10; // 10分の桁取得
num[5] = lotm.tm_hour % 10; // 1時の桁取得
num[6] = lotm.tm_hour / 10; // 10時の桁取得
for (j = 0; j < 7; j++) { // 7桁ダイナミック表示ルーチン
for (i = 0; i < 8; i++) { // 7セグメントデータセット
gpioWrite(nanaseg[i], segdata[num[j]][i]);
}
gpioWrite(common[j], COM_ON); // 7セグLED点灯
gpioDelay(2000); // 2ミリ秒点灯維持
gpioWrite(common[j], COM_OFF); // 7セグLED消灯
}
}
// pigpioライブラリ終了処理
gpioTerminate(); // これは無限ループに含まれないので不要?
}
$ g++ -Wall -pthread -o clock2 clock2.cpp -lpigpio -lrt
$ sudo ./clock2
ラズパイをPi4からZeroに変えました。CPU使用率の変化は
Pi4:約8.0%
Zero:約10.5%

このプログラムの表示遅延は最大で約14.8ミリ秒(0.0148秒)、最小は限り無くゼロのはず。その理由は約14.8ミリ秒置きに時刻取得して、表示を更新しているからです。
↓ 0.1秒桁用7セグLEDのコモン端子に繋がるオンオフを、オシロスコープで観測した画像です。