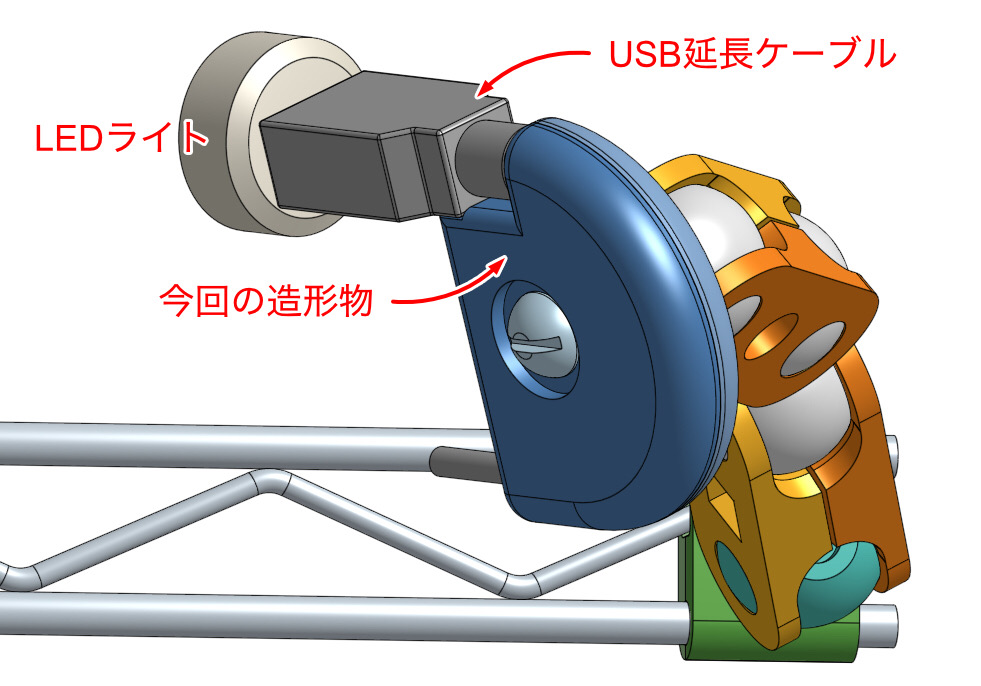
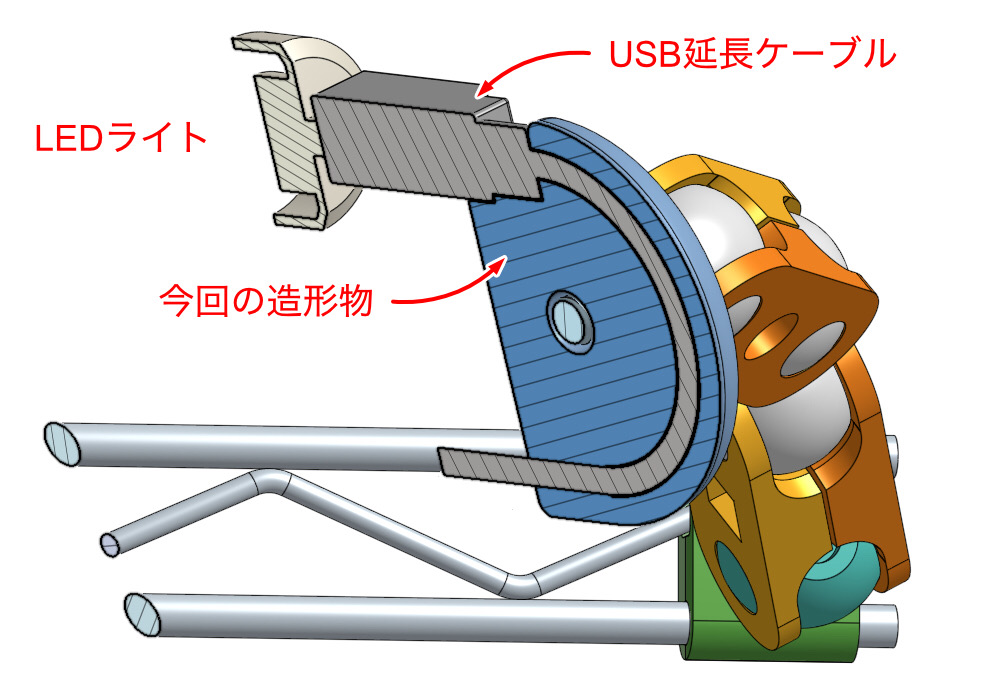
ウインドジャマー付き(画像にウインドジャマーは無いけど)のPCM-D50を机の上で使う時に便利なスタンドを造形しました。


↓ Onshapeのスクリーンショット。
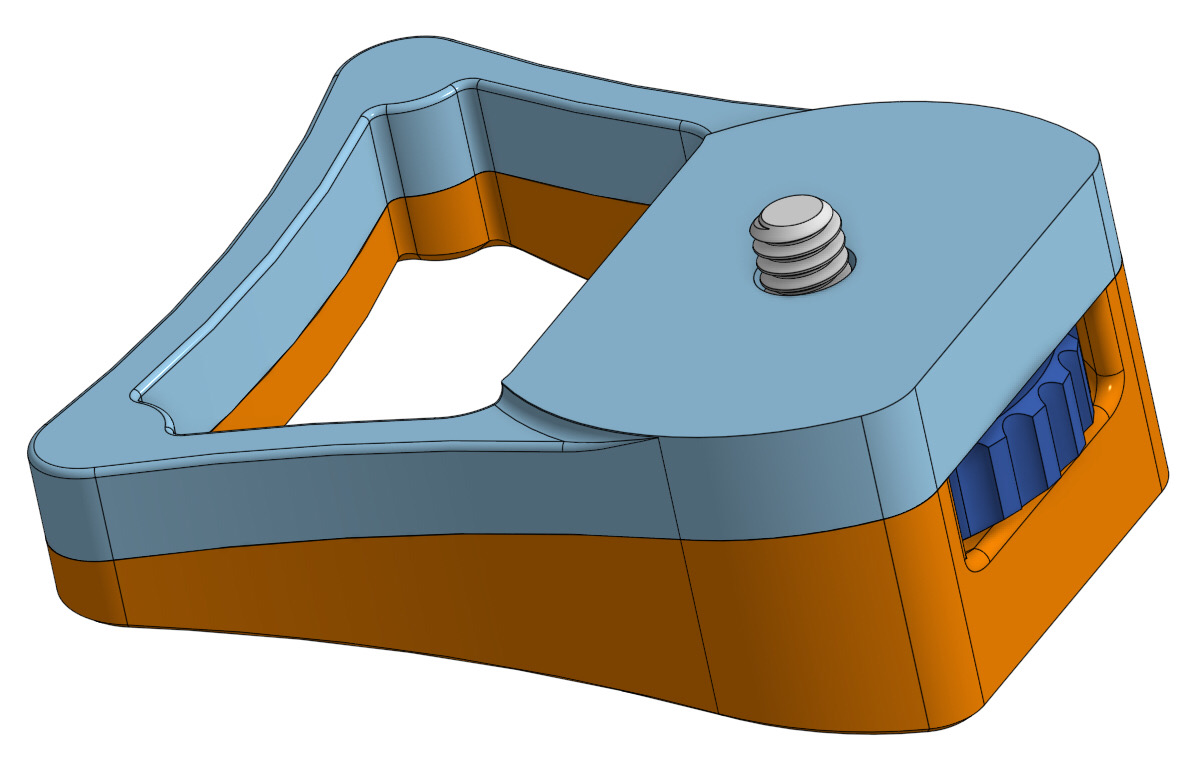
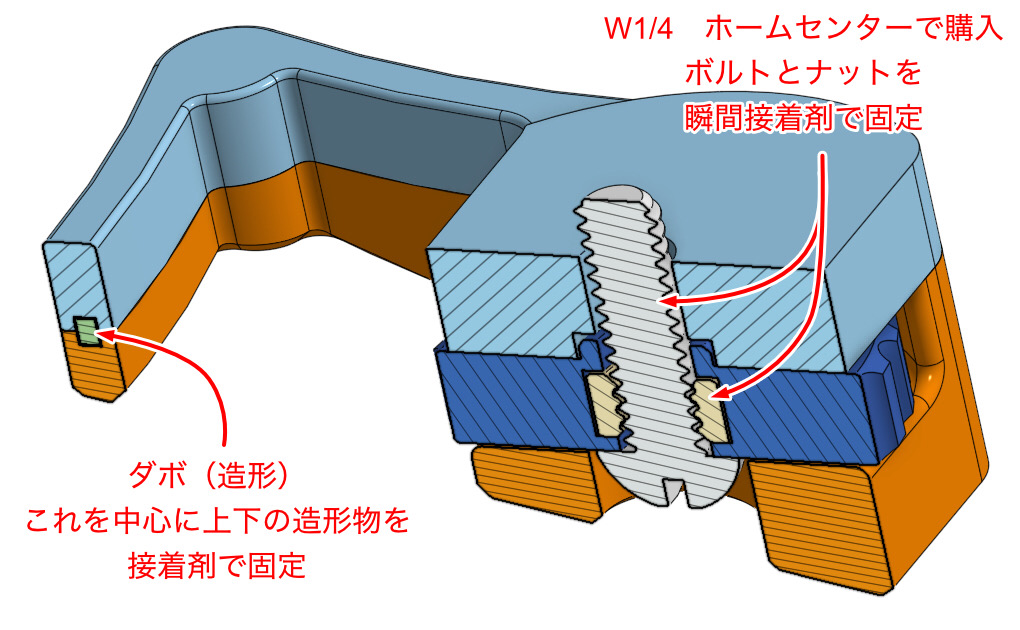
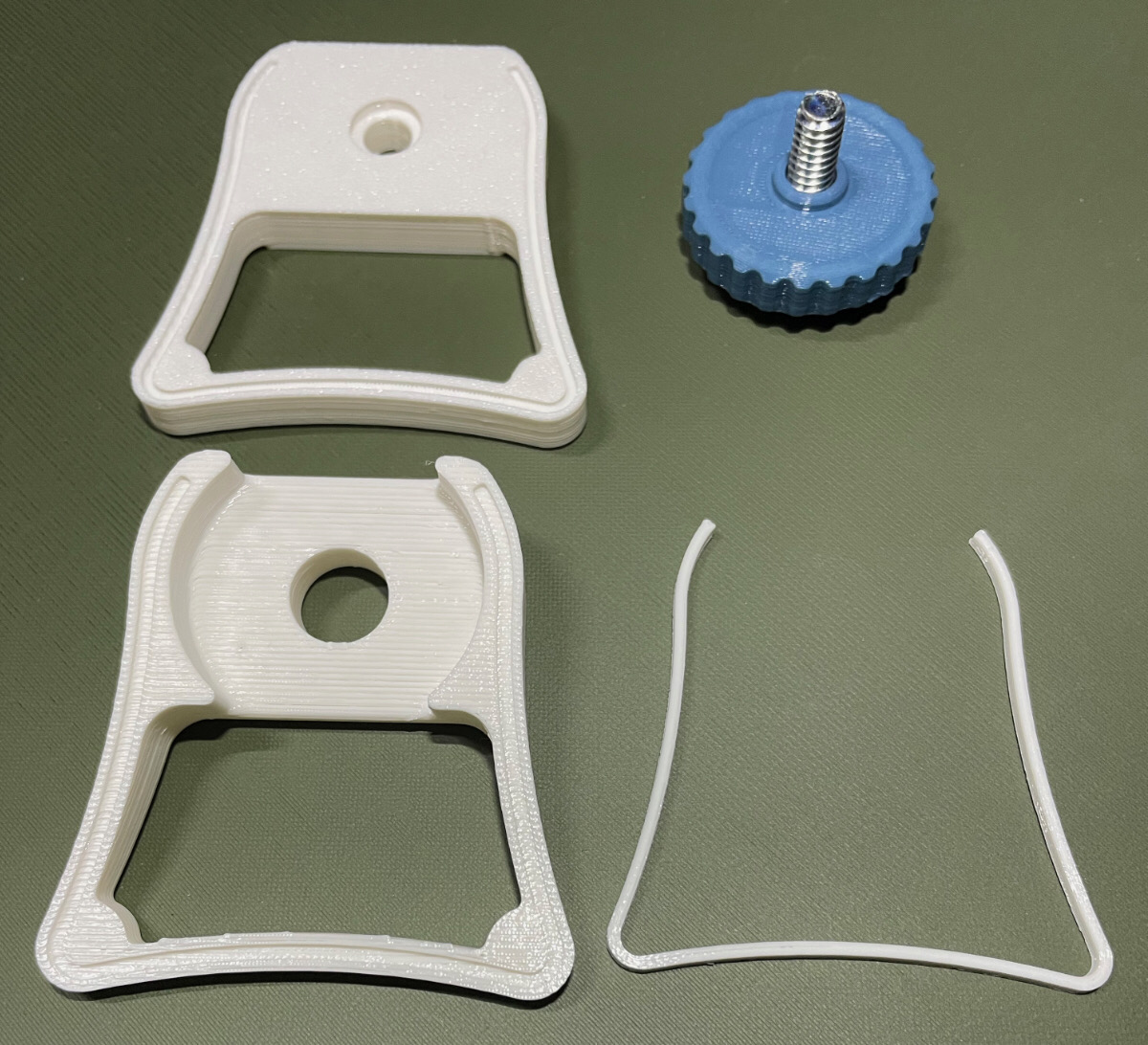
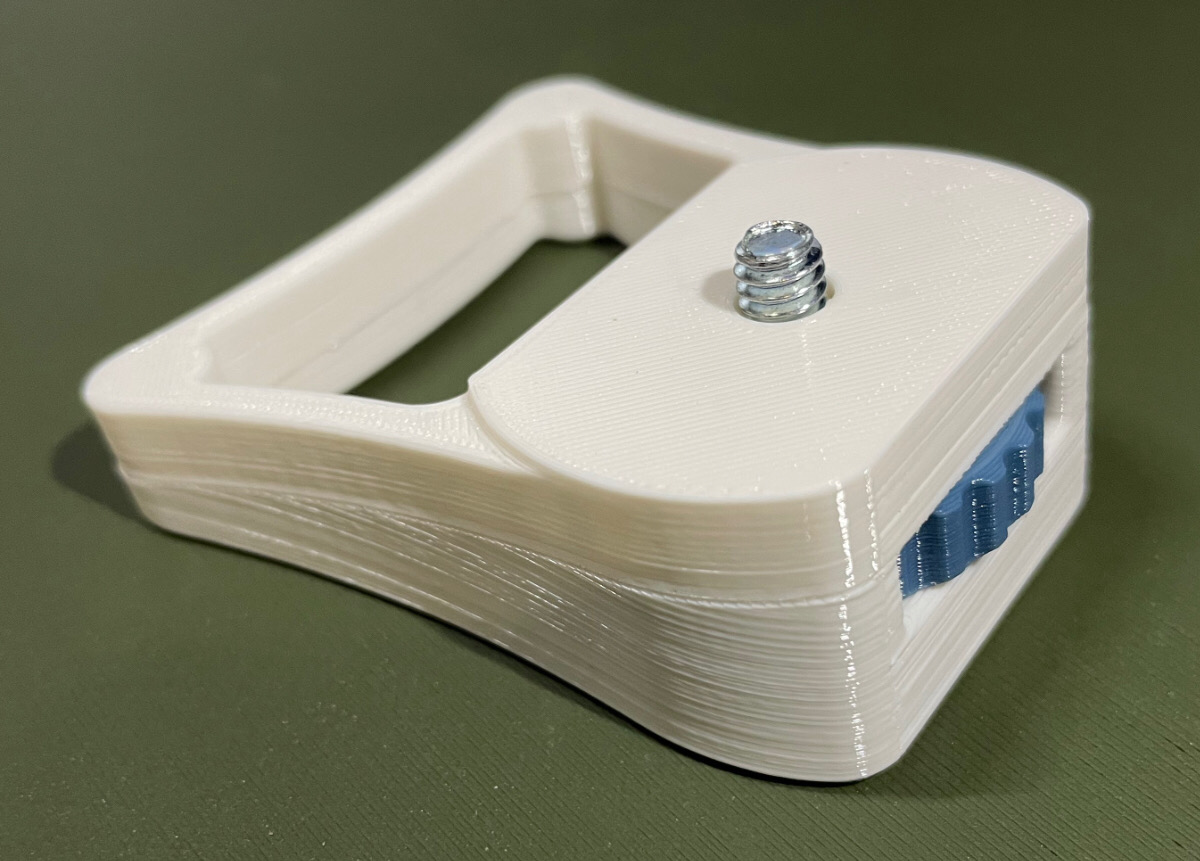
↓ W1/4ボルトとナットはホームセンターで購入。そして白色と青色の部品が今回の造形物。
ウインドジャマー付き(画像にウインドジャマーは無いけど)のPCM-D50を机の上で使う時に便利なスタンドを造形しました。
↓ Onshapeのスクリーンショット。
↓ W1/4ボルトとナットはホームセンターで購入。そして白色と青色の部品が今回の造形物。
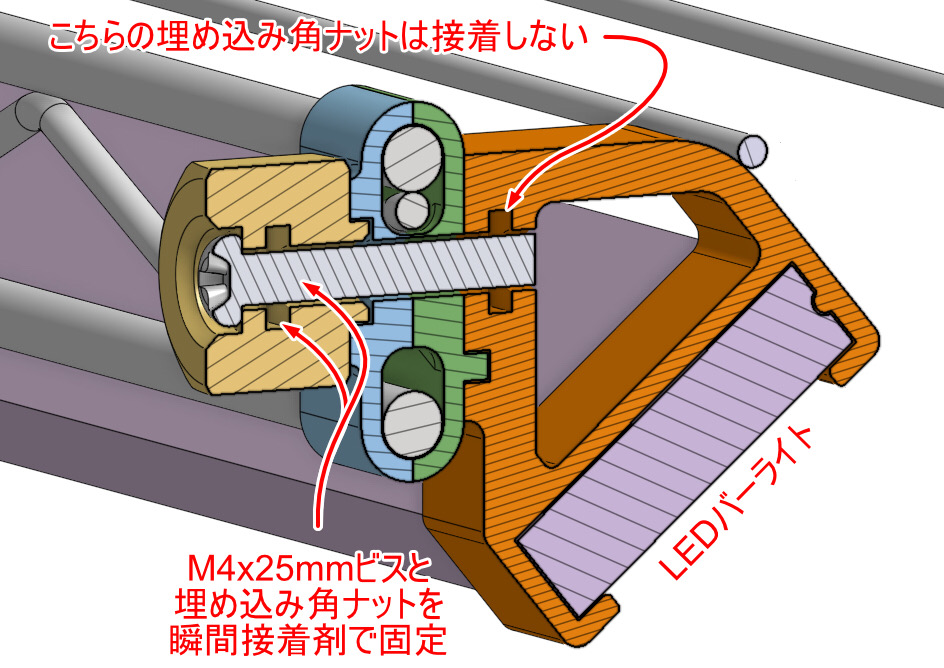
エレクターシェルフ風ラックに、LEDバーライトを取り付ける為のアーム類を造形しました。
| 3Dプリンター | Ender-3 V3 SE |
| ノズル径 | 0.3mm |
| 積層ピッチ | 0.16mm |
| 温度 | ノズル : 255℃ ベッド : 80℃ |
| 印刷速度 | 外壁20mm/s 他40mm/s |
| フィラメント | PRINSFIL PETG white 1kg 購入価格税込1,893円 Amazon |
| 3DCAD | Onshape(無料サブスクリプション) |
| スライサー | Creality Print 6.3.0.3420 |

| 3Dプリンター | Ender-3 V3 SE |
| ノズル径 | 0.3mm |
| 積層ピッチ | 0.16mm |
| 温度 | ノズル : 255℃ ベッド : 80℃ |
| 印刷速度 | 外壁20mm/s 他40mm/s |
| フィラメント | PRINSFIL PETG white 1kg 購入価格税込1,893円 Amazon |
| 3DCAD | Onshape(無料サブスクリプション) |
| スライサー | Creality Print 6.3.0.3420 |
↓ 青ラインは、その位置だけ一時停止して青色のフィラメントを手動で変えて造形しました。

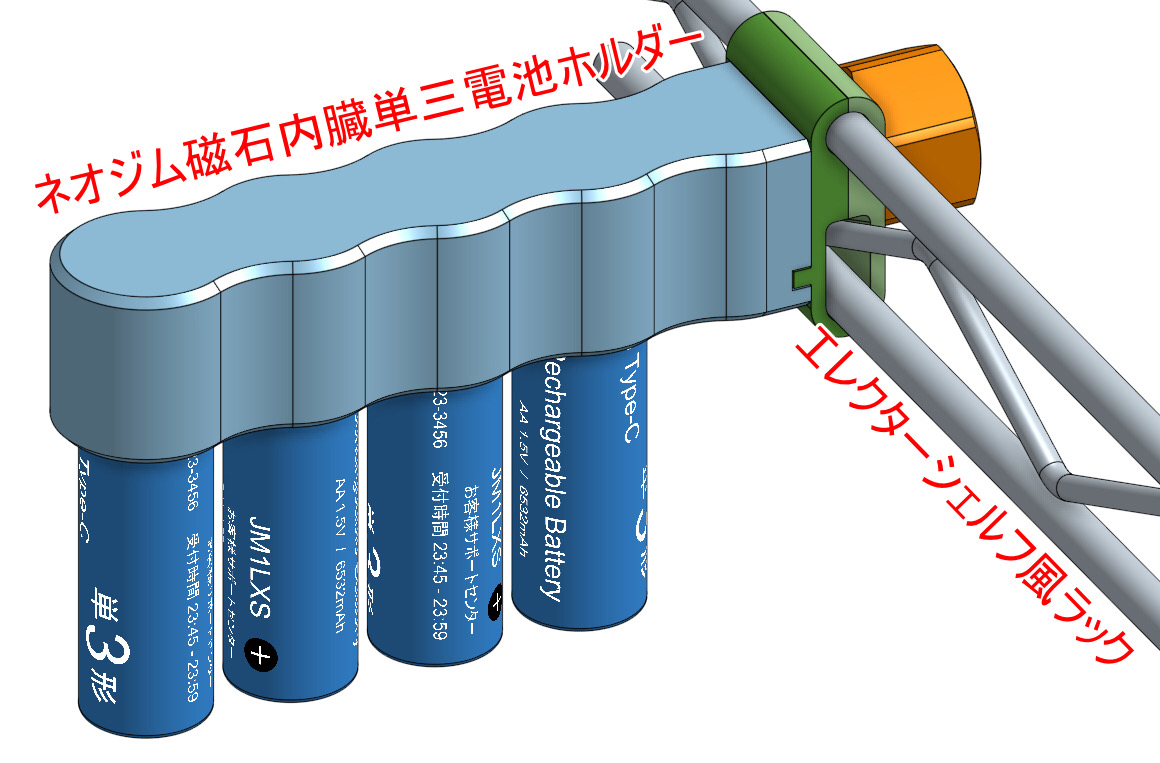
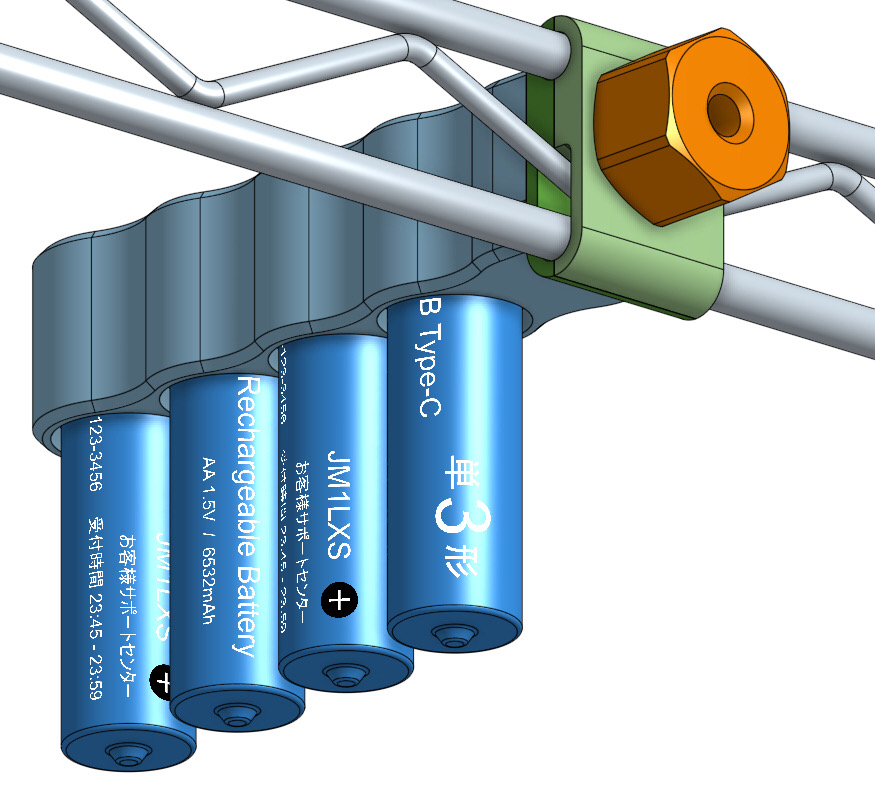
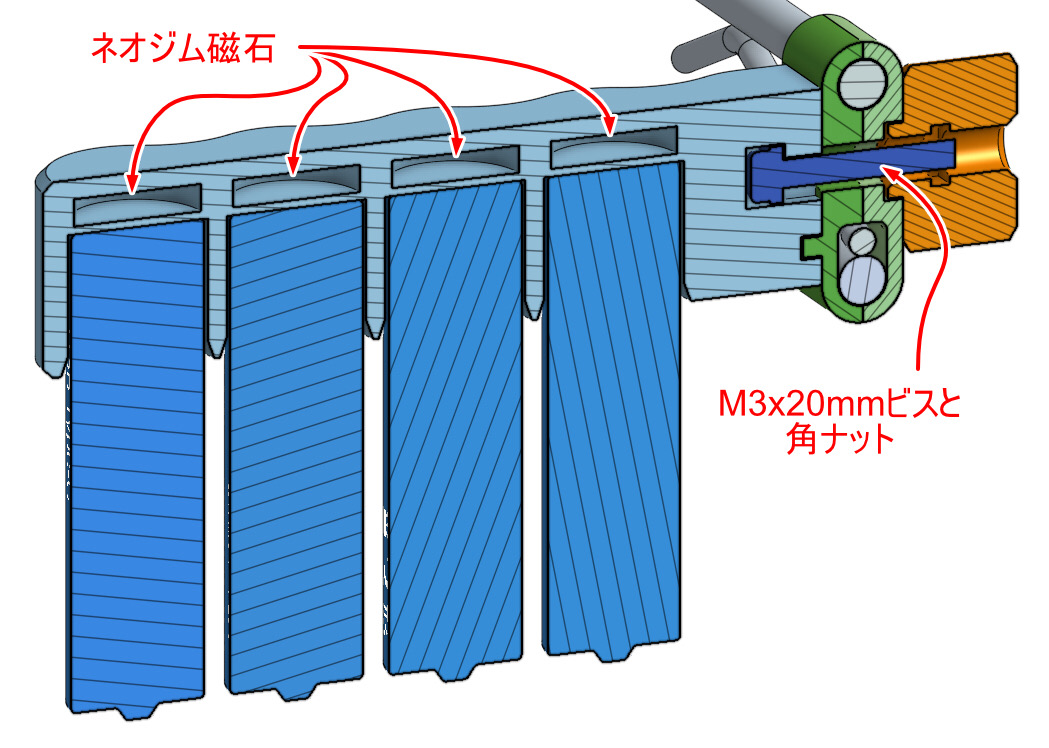
ホルダー本体に埋め込む、ネオジム磁石4個とM3x20mmビスと角ワッシャー。図ではオレンジ色のナットに、埋め込む角ワッシャーは、それぞれ造形時に一時停止して、埋め込んでいます。
使用方法は、充電済みの充電池をネオジム磁石の磁力で4本下げる事が出来て、必要な時にサッと手に取る事が出来る優れ物。
単3形だけで無く、単4形も大丈夫。
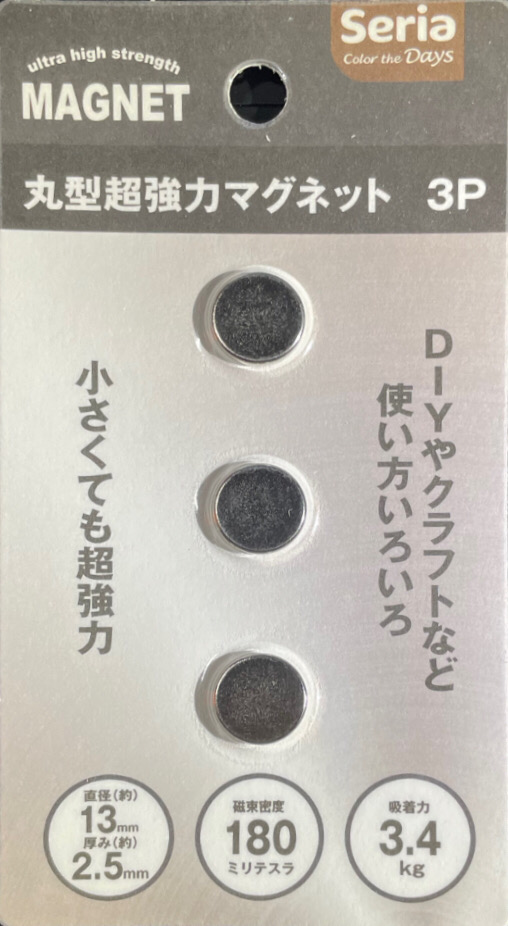
↓ ネオジム磁石はセリアの13mm x 2.5mmを4個使用。
【注意】この記事には、ラズパイやラズパイで動くC言語で書かれたソフトの内容を含みます。しかし、私はこれらの専門家では無く素人です。記事内容に誤りがあるかも知れません。
以前、ラズパイ5にGNSSモジュールを繋げて、Straturm 1相当のNTPサーバーを作りました。RPi5とGNSS(GY-NEO-6MV2)
あの時の環境で使用したラズパイ5を、ラズパイ2に変更して Straturm 1相当のNTPサーバーにしようとしたら、相当苦労しました。
この記事は、その苦労話です。
↓ この画像は、相当な苦労と時間を費やした成果で得た、思い通りに動く様になった時のものです。
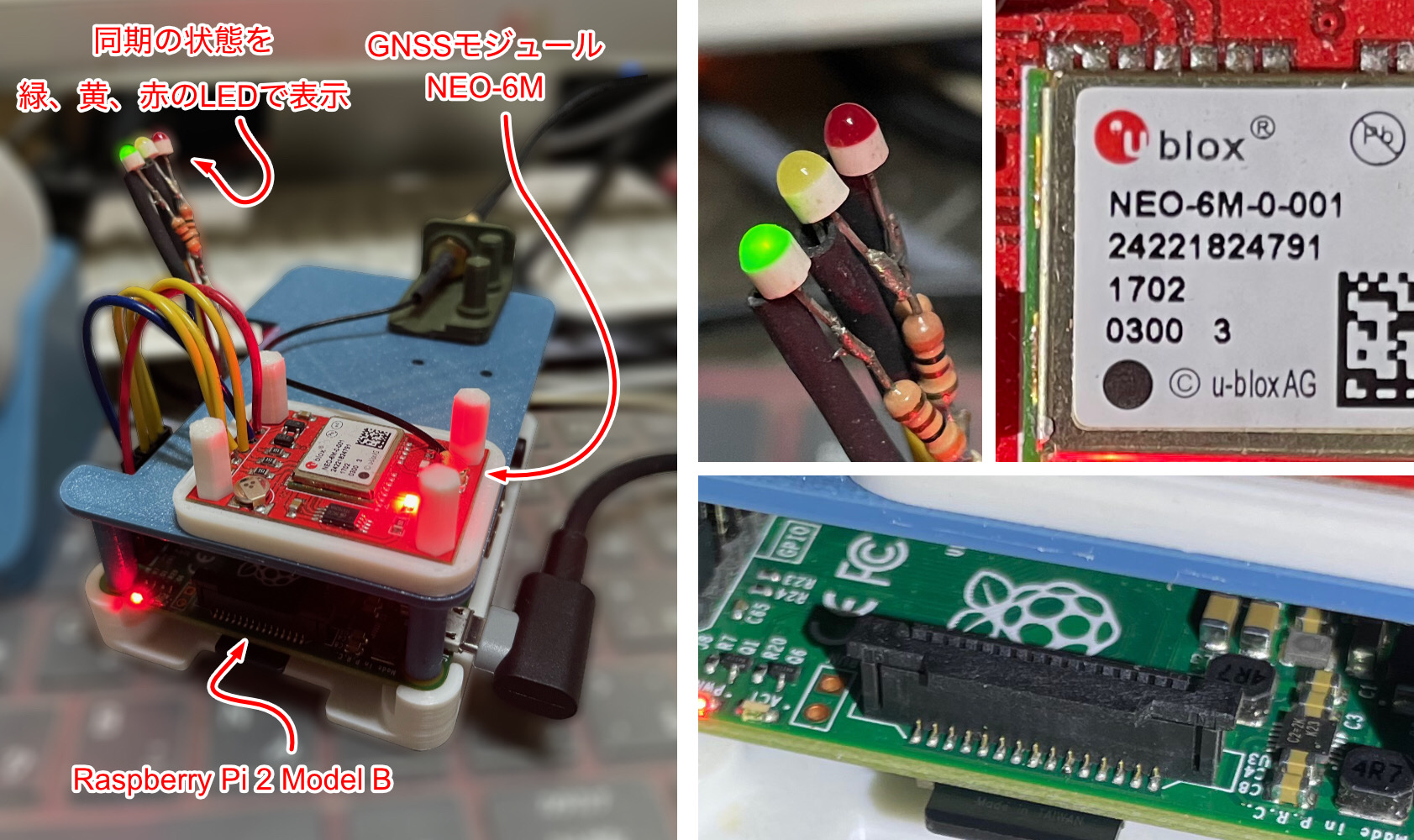
何に苦労と時間を費やしたかと言うと、上記の画像にある緑、黄、赤のLEDが点灯しないのです。思い通りに点灯するまでに相当な苦労をしました。
↓ 自作ソフトAとBの関係を示すフローチャート。自作ソフトAは同期先判定を担当、自作ソフトBはLED点灯を担当。
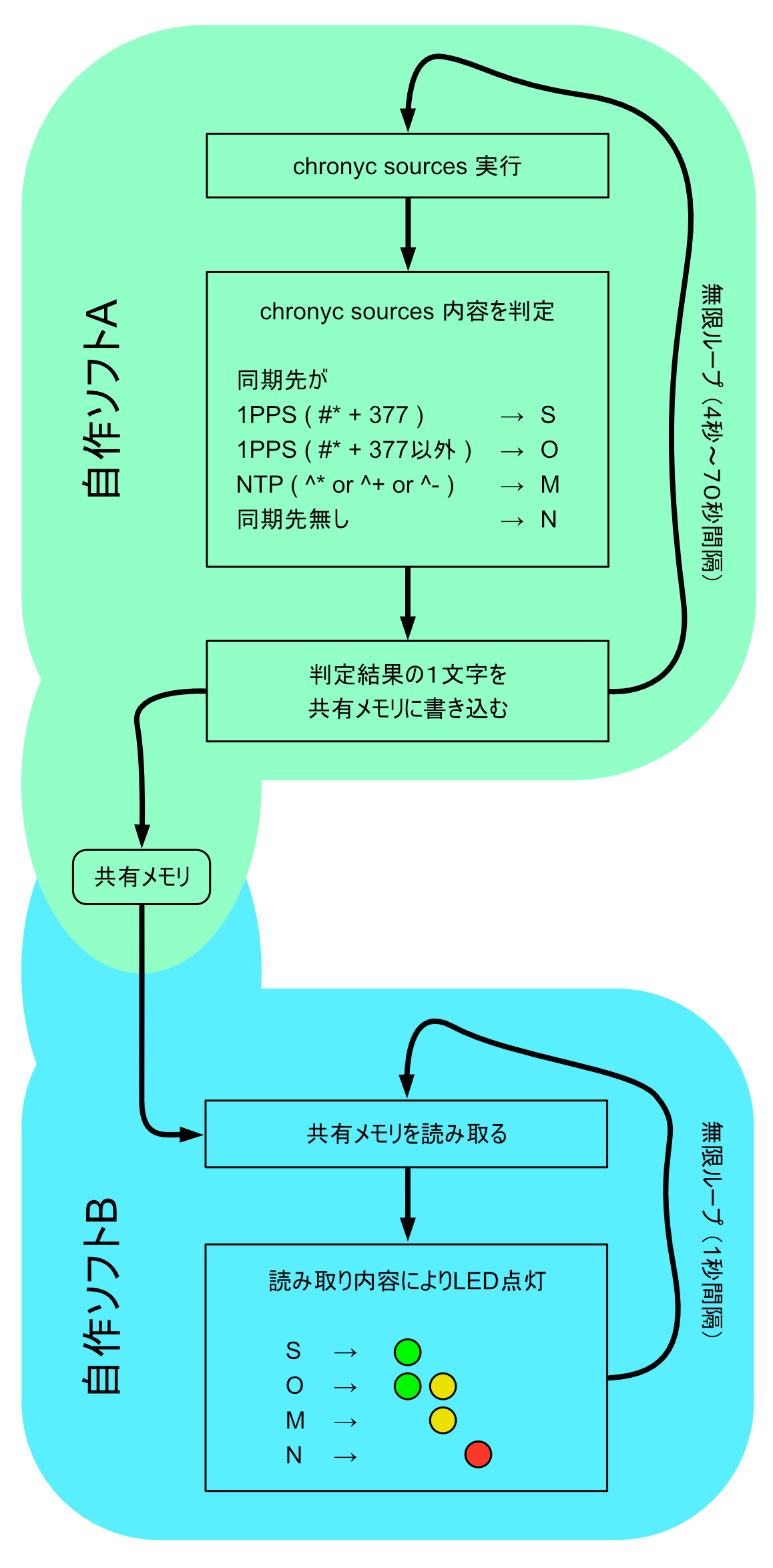
↑ フローチャートで分かる通り、自作ソフトBは、自作ソフトAに依存してします。それは、自作ソフトAの判定結果で変化する共有メモリ内の情報を自作ソフトBで読み取り、LEDを点灯させているからです。
LEDが点灯しなかった原因は?
誤り → After = chrony.service
正解 → After = chronyd.service
↑ 私、ドヤ顔で書いていません。恥ずかしいし、「こんなんで記事書くな」と思った。けど、この記事は残します。
気を取り直して、上手くLEDを点灯させる為の自作ソフトAとB、それぞれのユニットファイルを見てみます。
先に起動させたい自作ソフトAのユニットファイルは
After = chronyd.service
自作ソフトAの次に起動させたい、自作ソフトBのユニットファイルは
After = 自作ソフトA.service