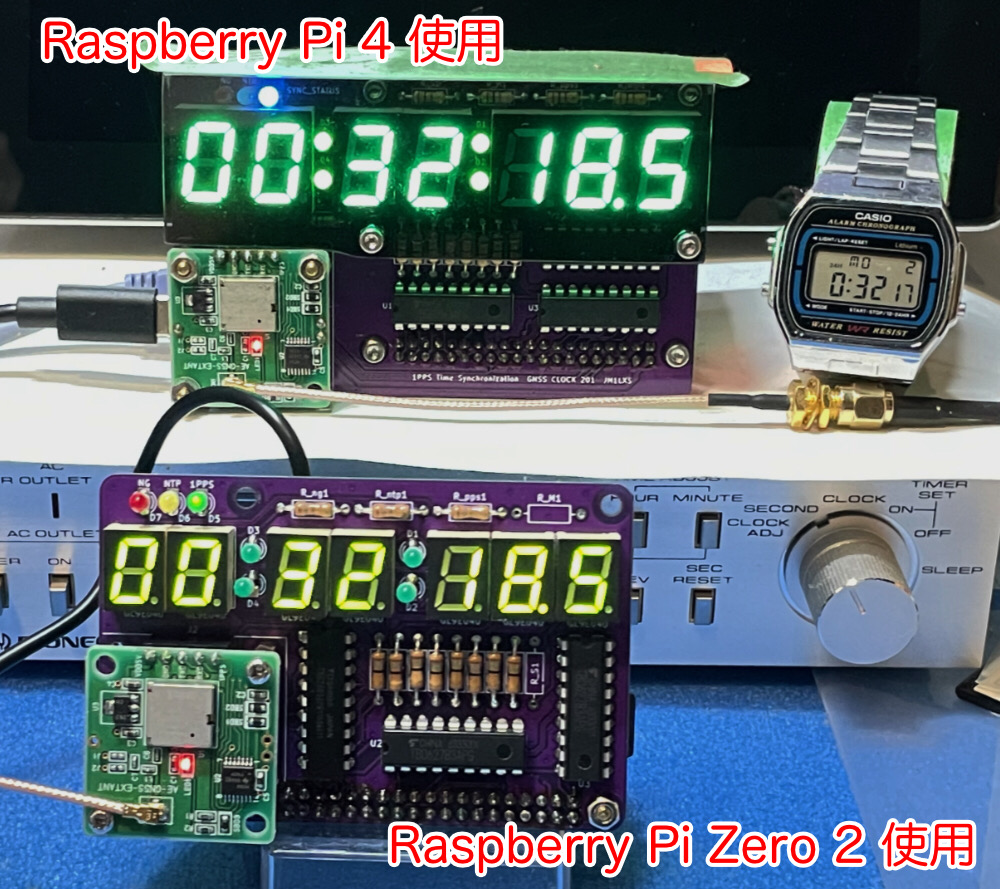
秋月電子のGNSS受信機キット(K-13849)は、バックアップ電池(CR2032)が使えるけど、その電池は要らないかも。私の経験からの考え。

そのバックアップ電池が要らない理由は、1PPS出力しなくなる為です。私が持っている個体だけかも知らませんが、実際に起きた現象を書くと。それは、バックアップ電池の寿命のせいか、それくらいの使用期間が経過した頃、1PPS出力しなくなる事が時々起こる様になったのです。その時は既に2台体制になっていたので、もう片方の外部アンテナと交換しても結果は同じ。またGNSS受信機キットのファームウェアが古いから、そのせいも疑ったのですが、アップデートの作業が面倒でアップデートは見送り。これは据置きタイプのGPS時計に使用しているので、24時間365日電源入れっぱなし。なのでバックアップ電池は不要だから電池を外そうとなった訳です。まぁ新しい電池に交換すれば、また暫く大丈夫かもだけど、要らないなら無い方が面倒事も無いし。
結果大正解。バックアップ電池を外してから半月くらい経ちましたが、1PPS出力無しの現象は見ていません。「見ていない」とは、24時間監視出来ないからです。
話は変わるけど、この秋月電子のGNSS受信機キット(K-13849)は、現在(投稿時)、秋月電子で扱っていません。なんで? 再販して欲しい。
↓ でも関連したQ&Aは残っている。
GNSS(GPS・GLONASS・QZSS)受信機キット 1PPS出力 みちびき2機対応 アンテナ外付タイプの質問と回答