ラズパイ5に、余っているGPS(GNSS)モジュールを繋げてみようと思い、ケースをOnshapeで設計中。そのケースは3Dプリンター(Ender3 V3 SE)で造形します。本当に3Dプリンターは便利。
使用3D CADはOnshapeです。先日よりFreeCADからOnshapeに変えたんですが、FreeCADより使い心地が良いです。
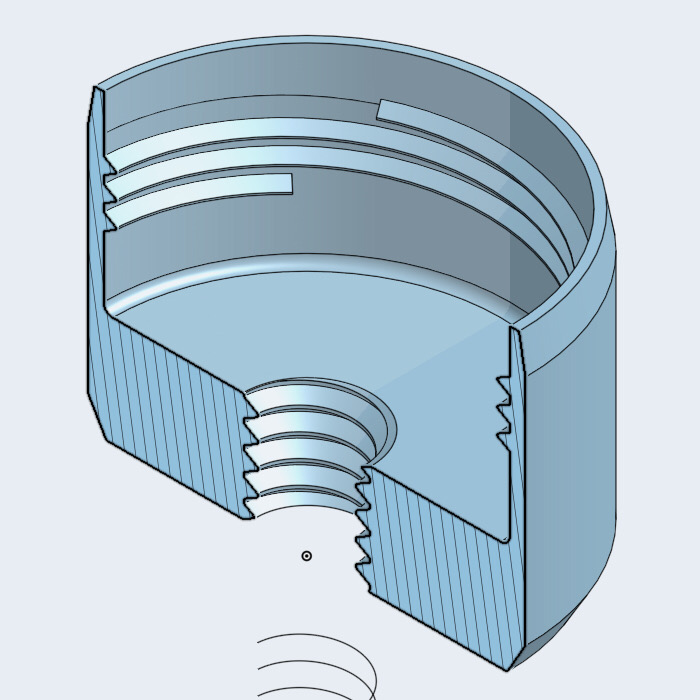
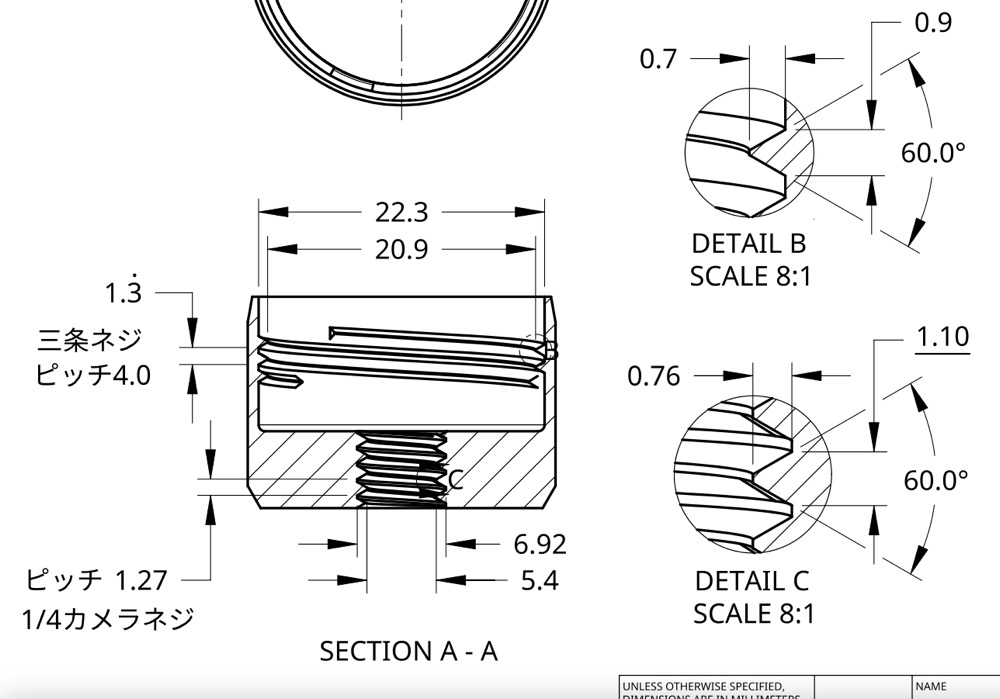
↓ 画像にある3Dモデルは、全て私がOnshapeで作りました。今はOnshape上にて最後の確認、ねじの収まり具合や、GNSSモジュールが他と干渉しないか確認している所です。断面図もいい感じに見れて、なかなか良いです。
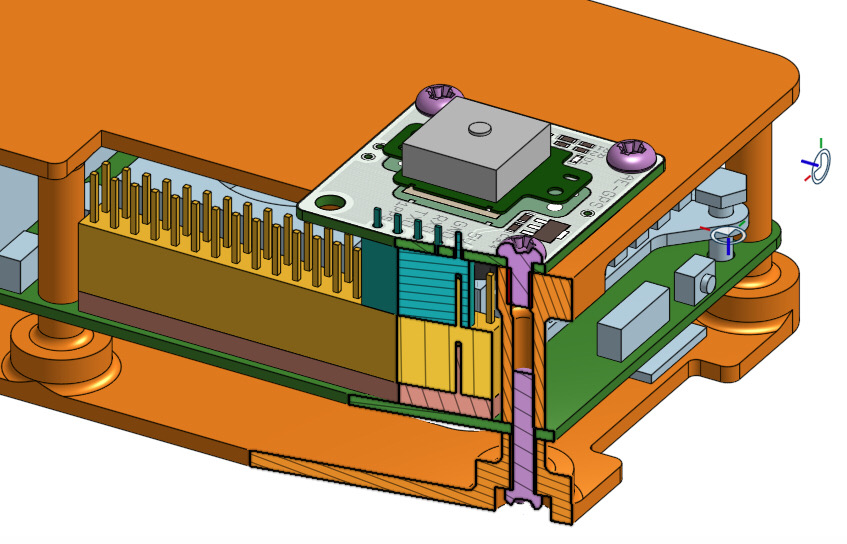
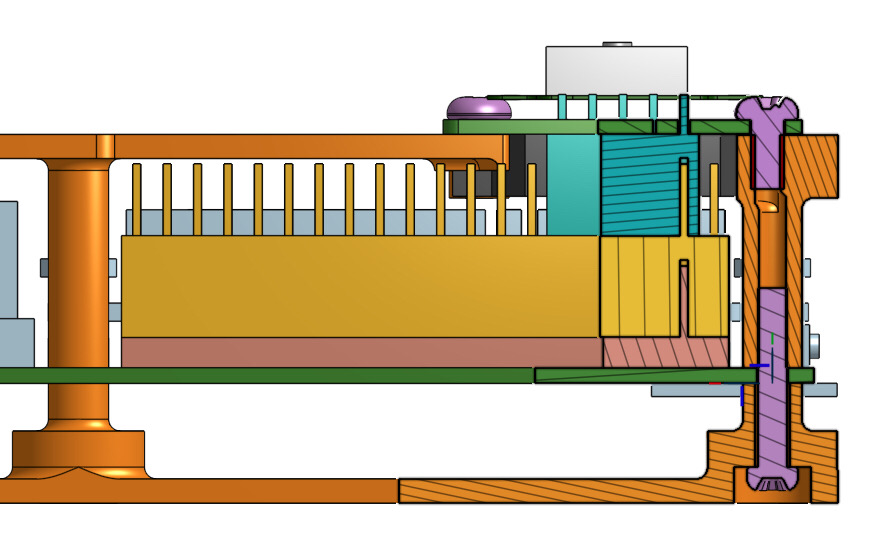
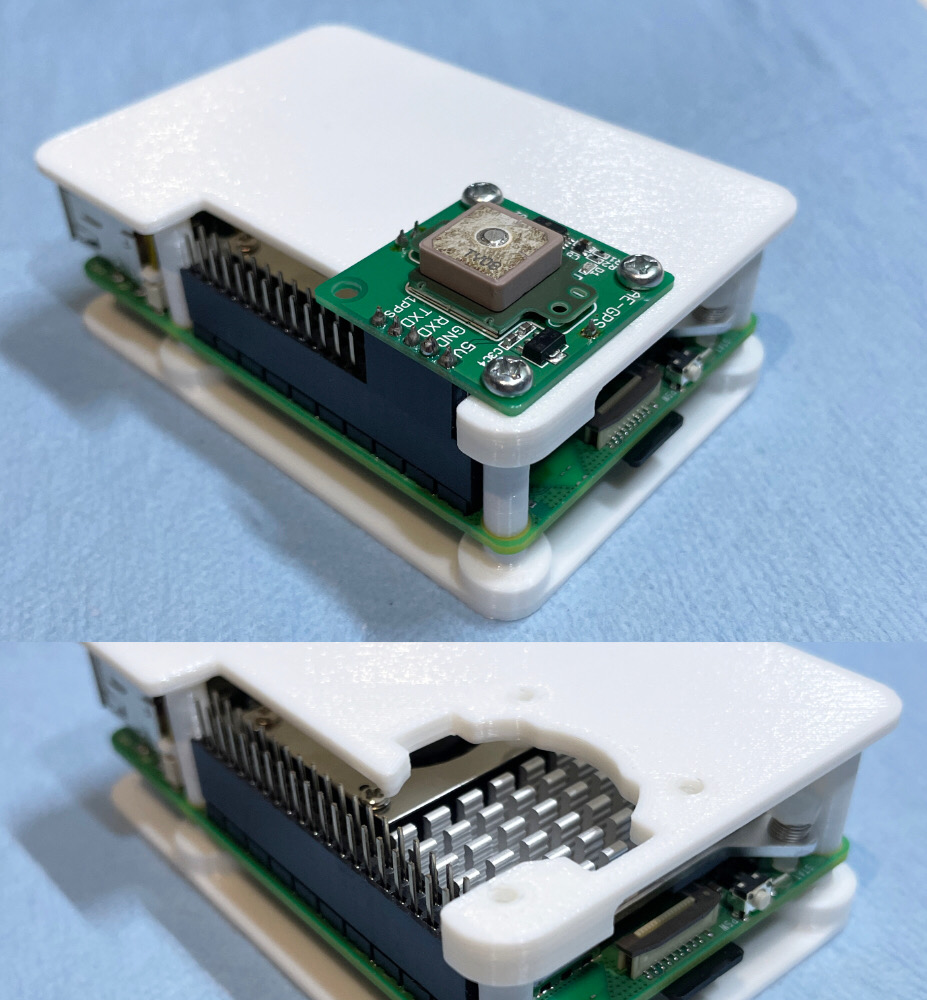
GNSSモジュールが収まる所の設計と造形は出来ました。
RPi5にGNSSモジュールを繋げましたが、RPi4やzero2の時と同じ様になりません。
何がならないかと言うと、GNSSモジュールとNTPが同期出来ないんです。RPi5はUART端子が新たに増えて、その影響なのか、ttyS0からttyAMA0に変更したりググって色々試しましたが、私には解決出来ませんでした。
誰かが、それを解決してくれるのを待ちましょう。