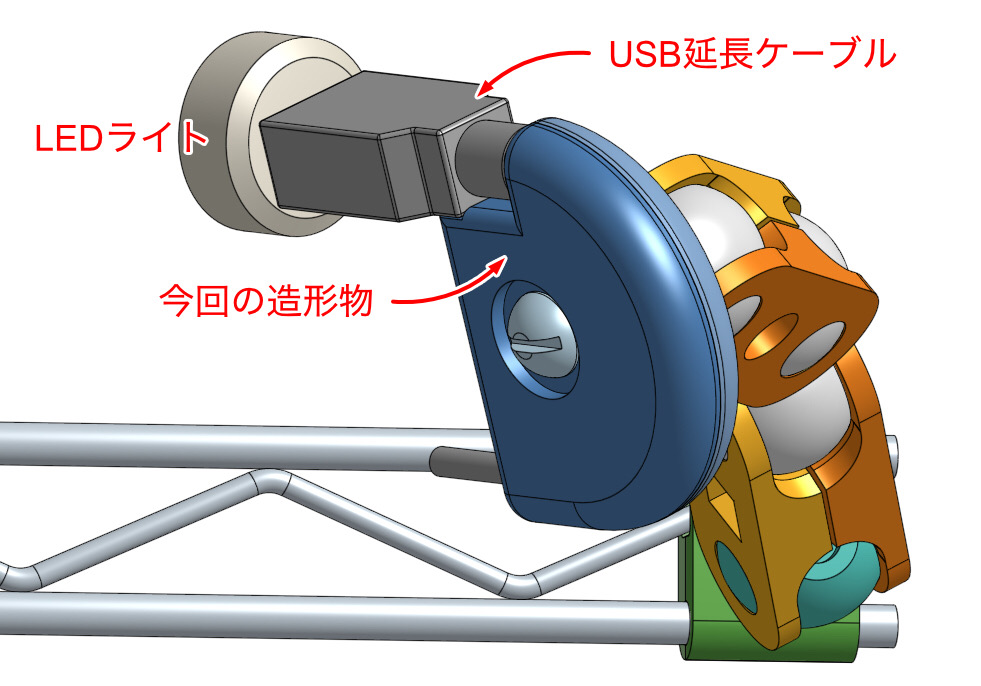
ウインドジャマー付き(画像にウインドジャマーは無いけど)のPCM-D50を机の上で使う時に便利なスタンドを造形しました。


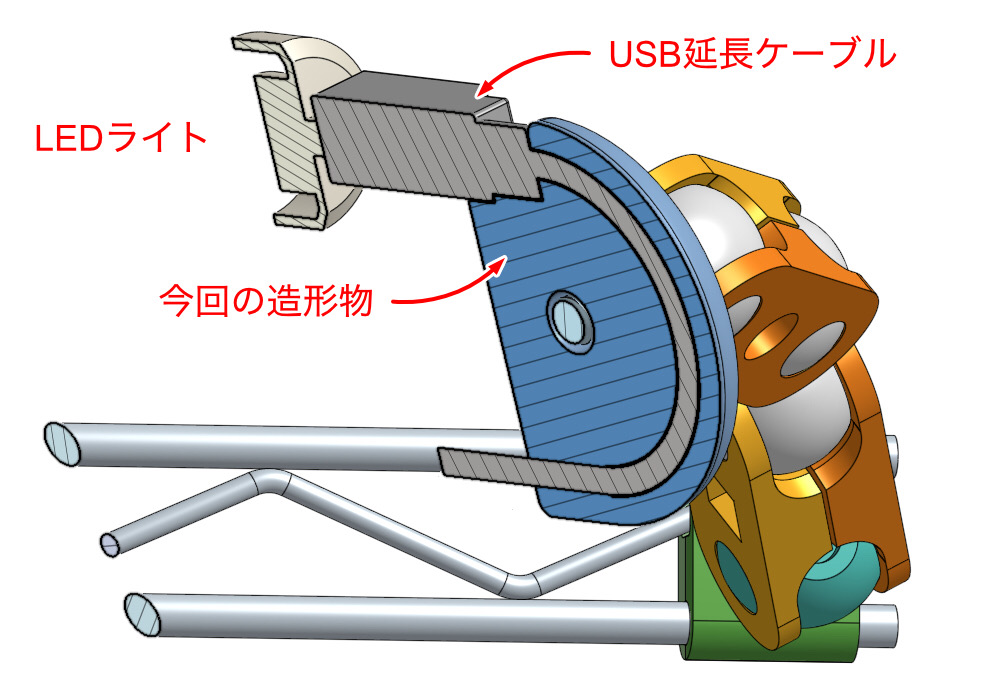
↓ Onshapeのスクリーンショット。
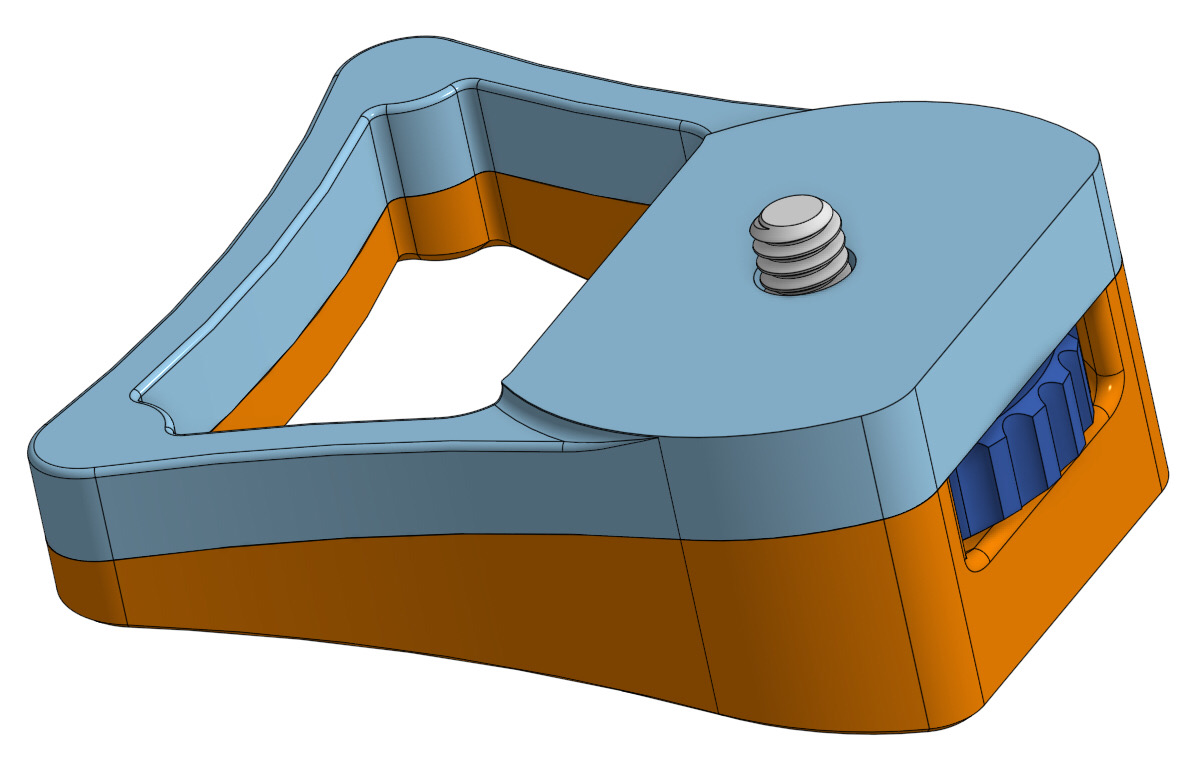
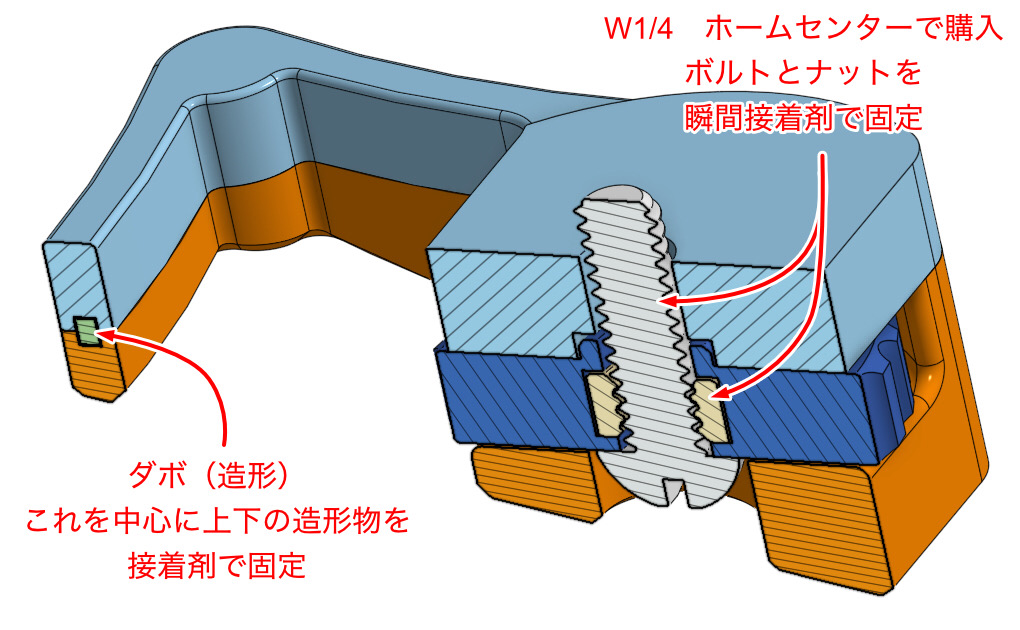
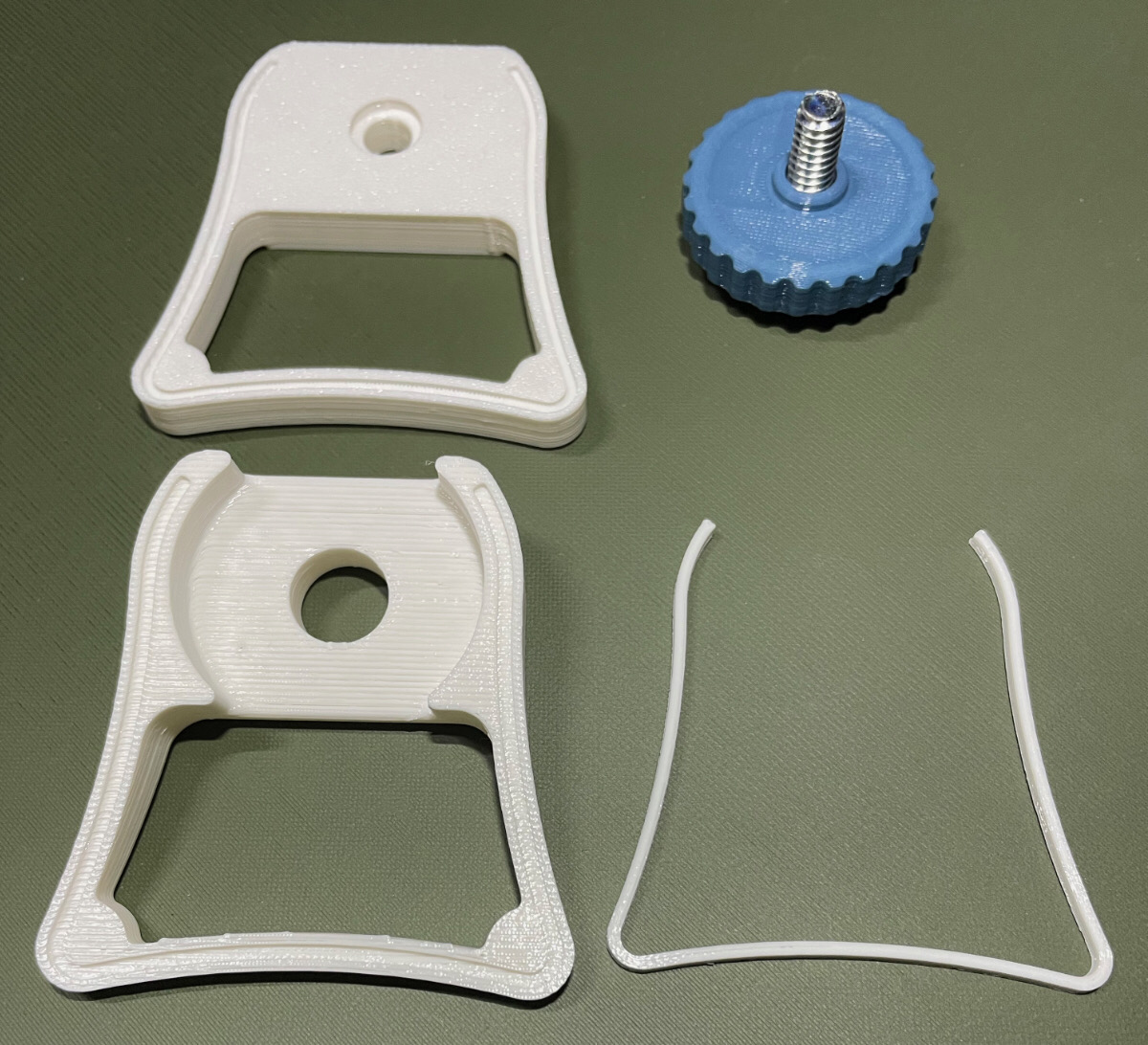
↓ W1/4ボルトとナットはホームセンターで購入。そして白色と青色の部品が今回の造形物。
ウインドジャマー付き(画像にウインドジャマーは無いけど)のPCM-D50を机の上で使う時に便利なスタンドを造形しました。
↓ Onshapeのスクリーンショット。
↓ W1/4ボルトとナットはホームセンターで購入。そして白色と青色の部品が今回の造形物。
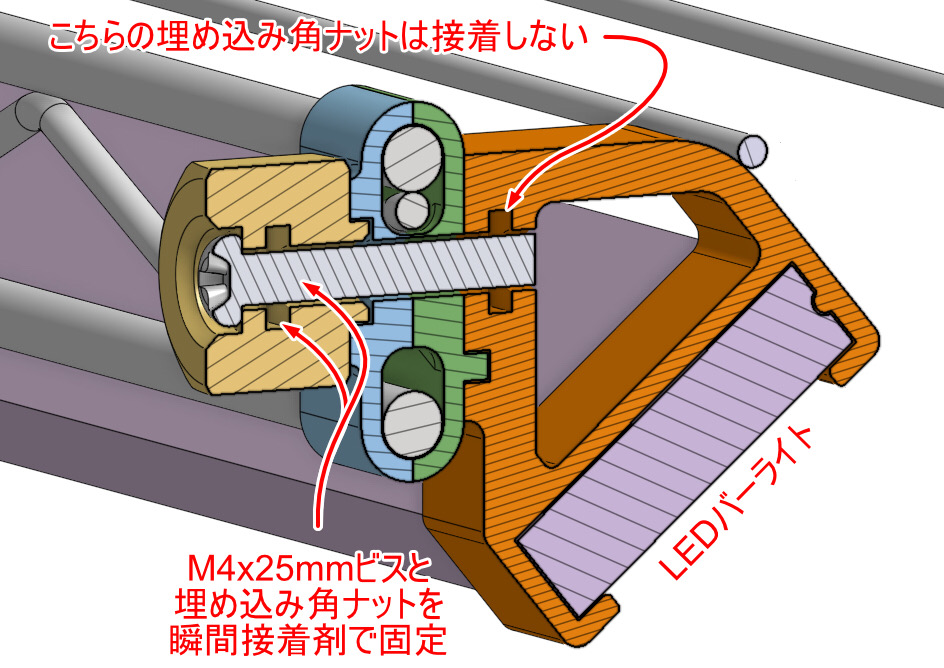
エレクターシェルフ風ラックに、LEDバーライトを取り付ける為のアーム類を造形しました。
| 3Dプリンター | Ender-3 V3 SE |
| ノズル径 | 0.3mm |
| 積層ピッチ | 0.16mm |
| 温度 | ノズル : 255℃ ベッド : 80℃ |
| 印刷速度 | 外壁20mm/s 他40mm/s |
| フィラメント | PRINSFIL PETG white 1kg 購入価格税込1,893円 Amazon |
| 3DCAD | Onshape(無料サブスクリプション) |
| スライサー | Creality Print 6.3.0.3420 |

| 3Dプリンター | Ender-3 V3 SE |
| ノズル径 | 0.3mm |
| 積層ピッチ | 0.16mm |
| 温度 | ノズル : 255℃ ベッド : 80℃ |
| 印刷速度 | 外壁20mm/s 他40mm/s |
| フィラメント | PRINSFIL PETG white 1kg 購入価格税込1,893円 Amazon |
| 3DCAD | Onshape(無料サブスクリプション) |
| スライサー | Creality Print 6.3.0.3420 |
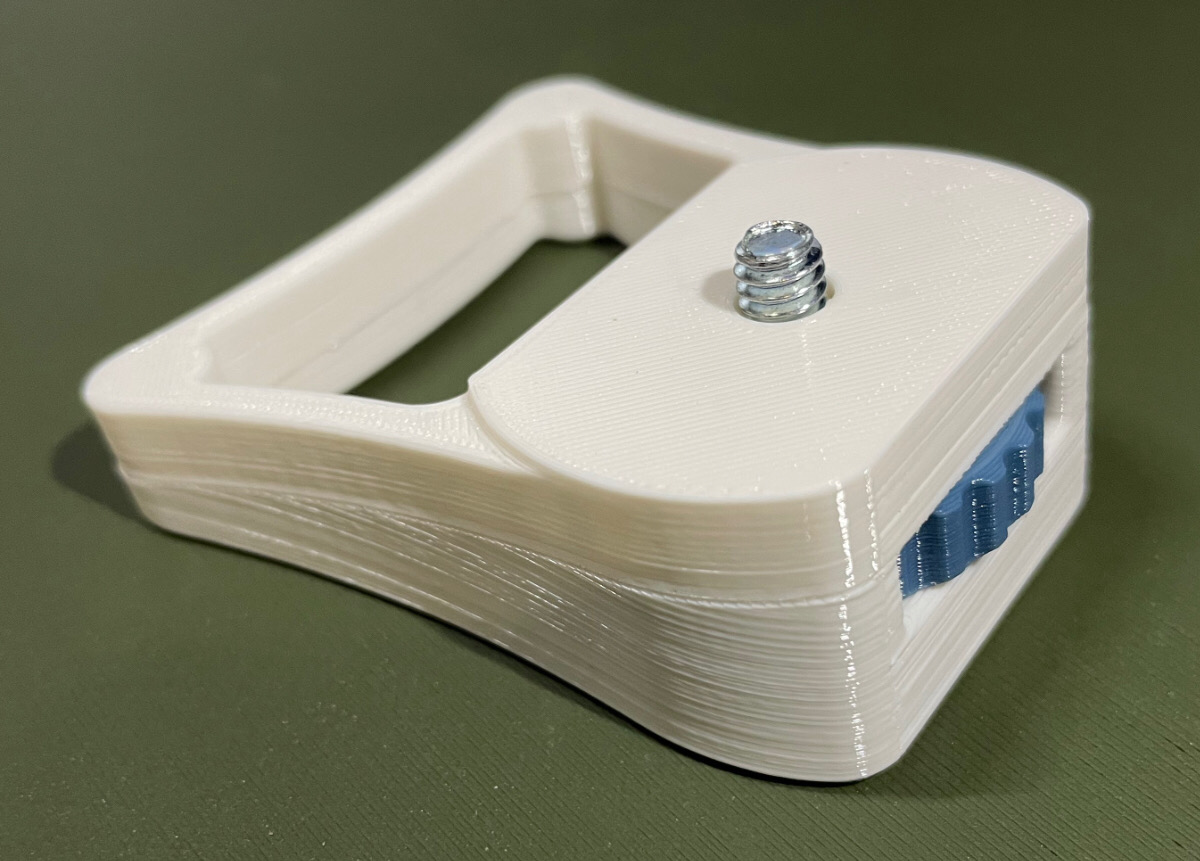
↓ 青ラインは、その位置だけ一時停止して青色のフィラメントを手動で変えて造形しました。

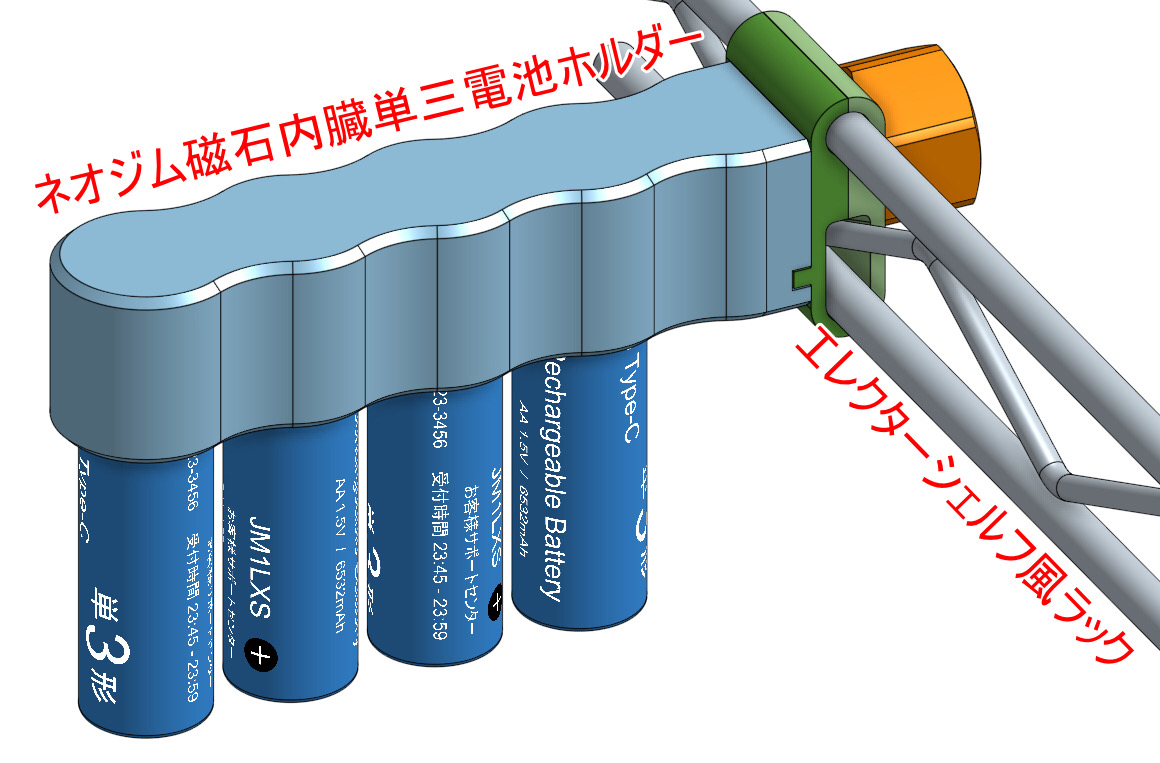
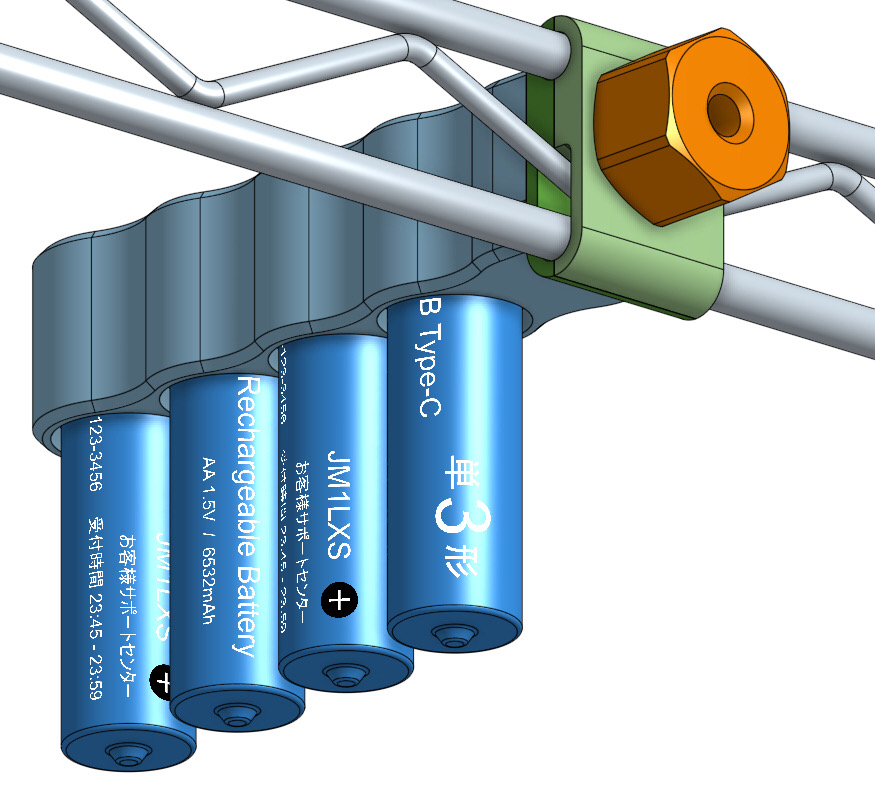
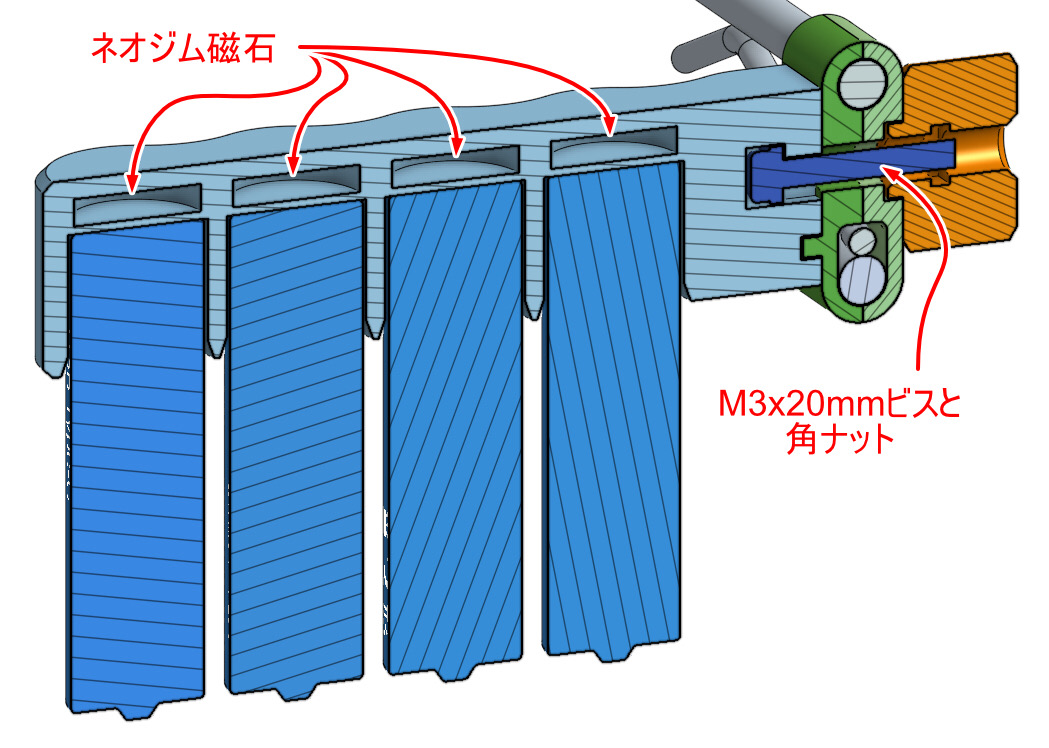
ホルダー本体に埋め込む、ネオジム磁石4個とM3x20mmビスと角ワッシャー。図ではオレンジ色のナットに、埋め込む角ワッシャーは、それぞれ造形時に一時停止して、埋め込んでいます。
使用方法は、充電済みの充電池をネオジム磁石の磁力で4本下げる事が出来て、必要な時にサッと手に取る事が出来る優れ物。
単3形だけで無く、単4形も大丈夫。
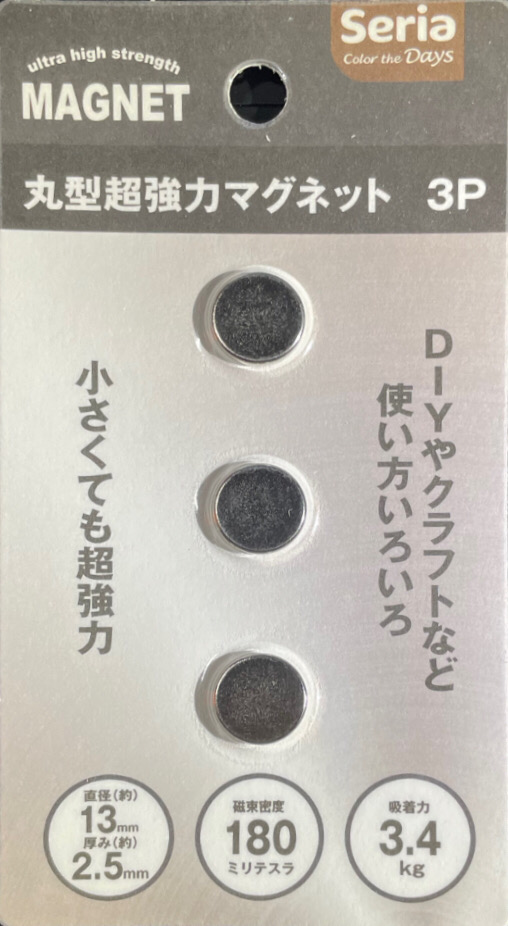
↓ ネオジム磁石はセリアの13mm x 2.5mmを4個使用。
ずいぶんと久し振りに、Ender-3 V3 SEのファームウェアアップデートをしました。V1.0.6 から V1.1.0に。
↓ ファームウェアアップデート完了後のInfo画面と、私のEnder-3 V3 SE に使われているチップです。

私、この3Dプリンターのファームウェアアップデートは苦手です。ファームウェアに同封の取説は簡素で、しかも中国語。
中国語を翻訳してその通りに作業をしても上手くいった事が無い。
実際、今回も中国語の説明通りに作業をしたら、スクリーン画面が最初のCREALITY文字が出る前の状態で進まない。一旦電源を落とし、SDカードを抜いて電源入れても、さっきの画面で止まったまま。「あ〜壊れた?」と思ったくらい。「やるんじゃ無かった」と後悔。
と後悔したままではいられない。さっきまで正常に使用出来ていた3Dプリンターが勿体ない。
↓ この状態から、ファームウェアアップデートに成功した手順を忘れる前に備忘録。
ファームウェアアップデートする場合、対象となるハードウェアは2つ。それは液晶パッドとEnder-3 V3 SE本体。
ファームウェアのダウンロードは
www.creality.com で
V1.1.0_GD303STM32F401 のDownloadをクリック
↓
Ender-3 V3 SE_HWCR4NS200320C13C14_SWV1.1.0_GD303STM32F401.rar
ダウンロードした、拡張子がrarの圧縮ファイルを解凍すると、複数のファイルがあるが、使用するのは2つのみ。
↓ 今回、ファームウェアアップデートに必要なファームウェアは以下の2つ。
| 順番 | ハードウェア | ファームウェア |
| ① | 液晶パッド | tjc.tft |
| ② | Ender-3 V3 SE本体 | Ender3 V3 SE GD303SWV1.1.0_HWCR4NS200320C13_20250422.bin |
↑ アップデートの順番は、先に液晶パッド、その後プリンター本体にしました。
これら2つのファームウェアをSDカードのルートディレクトリにコピペして使用する。この時、私は心配性なので、2つ同時にコピペでは無く、ひとつずつコピペしてアップデートしました。因みに、ファイル名はそのまま使用。名前の変更は不必要。
↓ 尚、それぞれのSDカードスロットの場所は、画像の通り。

心配性の私が行った、実際のアップデート作業。
① 最初に液晶パッドのアップデート。
フォーマットしたmicroSDカードのルートディレクトリに、tjc.tftをコピペ。ファイル名は変更せずに、そのまま使用。このファイル以外は無い状態にする。
電源オフしているEnder-3 V3 SEの液晶パッドのmicroSDカードスロットに、microSDカードを差し込む。
Ender-3 V3 SEの電源を入れて、液晶画面に Update Successed! が表示されるまで、黙ってそのまま待つ。
② 次はEnder-3 V3 SE本体のアップデート。
フォーマットしたSDカードのルートディレクトリに、本体用ファームウェアをコピペ。ファイル名は変更せずに、そのまま使用。このファイル以外は無い状態にする。
電源オフしているEnder-3 V3 SE本体のSDカードスロットに、先程のSDカードを差し込む。
Ender-3 V3 SEの電源を入れて、そのまま待つ。少しすると、液晶画面が見慣れたのもになる。これでアップデート完了。
以上でファームウェアのアップデートは完了です。
しかし、①の液晶パッド用ファームウェアは、古いままみたいなので、今回のアップデートには必要無いかも知れません。
それに加えて不明なファイルがある。STM32F4_UPDATEフォルダに入っている、本体用と思われるファームウェアは何用?
チップの型番(チップバージョン?)によっては、これを使用するのかな?