【この記事投稿から約1ヶ月後(2026年1月25日)の感想】
約1ヶ月間、このラズパイ5+M.2 SSDを使用したけど、SDカードと比べて劇的に快適になった感じがしない。
この記事にも書いたけど、そもそもOctoPiにラズパイ5は勿体ない。但し私の使い方が軽いからかも。3Dプリンターをモニター(温度やカメラ画面を確認)するだけにOctoPiを使用。操作は直接3Dプリンターの操作パネルで行い、OctoPi経由での操作はしないので。
このラズパイ5、非ネットワーク3DプリンターのEnder-3 V3 SEをネットワーク対応にしてくれるOctoPiがインストールされています。
SDカードで十分だけど、ある事情でポチったラズパイ5用M.2アドオンボード(M.2 SSD NVMe 128GB付き)を活用してみました。
Freenove M.2 NVMe Adapter V2 for Raspberry Pi with 128GB SSD (Amazon)
ラズパイのストレージを、SDカード以外にするのは今回が初めて。事前にグーグル検索で得た情報のような特別な事は無くすんなりと。
Raspberry Pi Imagerで、SDカードの時と同じように(ケース使用の)M.2 SSDに書き込む。起動はどうしようかと少し悩みましたが、(今まで使っていた)SDカードは無しで、M.2 SSDだけで起動。特別な設定は無く、普通に起動出来たのでホッとしました。
この何も設定変更していない状態だと、PCIe Gen2.0のようです。
このアドオンボードの箱にURLが記載されていて、そこからマニュアルをダウンロード出来ます。
そのマニュアルの中に、Enable PCIe Gen3.0が有るので、ちょっとだけ試してみました。
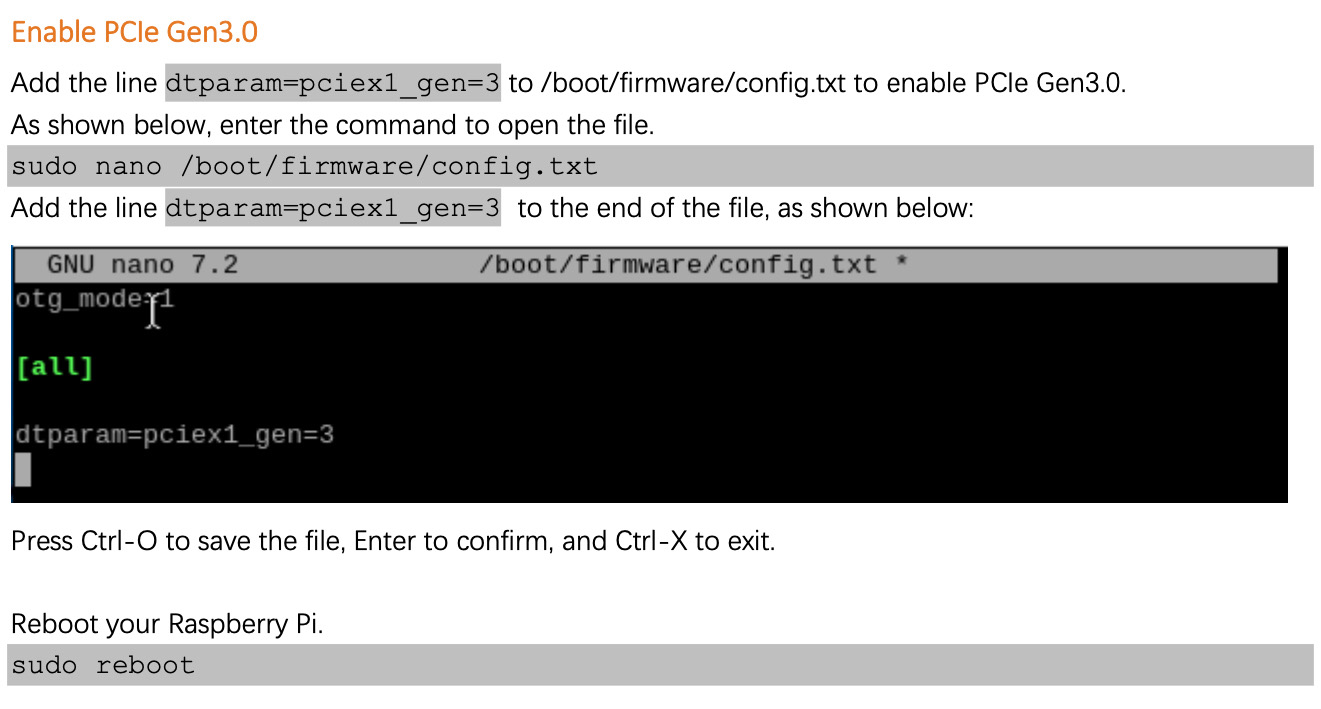
↑ ↓英語が(も)出来ない私にも分かるので、config.txtファイルの末尾に追記。
$ sudo vi /boot/firmware/config.txt
dtparam=pciex1_gen=3↓ リブートして、config.txtファイル変更前後の、それぞれのlspciコマンドで得た情報の一部を比較。
$ sudo lspci -vv
0001:01:00.0 Non-Volatile memory controller: Silicon Motion, Inc. SM2261XT x2 NVMe SSD Controller (DRAM-less) (prog-if 02 [NVM Express])
LnkSta: Speed 5GT/s (downgraded), Width x1 (downgraded)
| PCIe Gen2.0 | Speed 5GT/s (downgraded), Width x1 (downgraded) |
| PCIe Gen3.0 | Speed 8GT/s, Width x1 (downgraded) |
↑ のようです。これ私には良く分からないので、誤りがあるかも知れません。それでも5GT/sから8GT/sになった文字の変化くらいは、私にも分かります。
それがOctoPi運用上どれくらいの違いを、肌で感じる事が出来るのか。微々たる物と私は勝手に思うし、パワフルになった分、電流を多く必要となるのではと、余計な不安に駆られたりして。結局……
私はconfig.txtの末尾に追記した1行を削除して、元に戻しました。
さて。M.2 SSDになった事で得たメリットは?
OctoPiを使用するだけなら、SDカードと変わりないかなぁ。そもそも、OctoPiにラズパイ5はオーバースペックだと思う。以前はラズパイ2で問題無くやっていた。別の話しですが、そのラズパイ2は、何故かUSBポートが使えなくなったので、OctoPiから引退しました。でもUSBポートを必要としない所で現役中。
メリットを上げろと言うなら「SDカードより、M.2 SSDの方がカッコいい」